МЫ СОЗДАЕМ И ПРОИЗВОДИМ
ЭЛЕКТРОННЫЕ НАБОРЫ И МОДУЛИ !






")
")
Описание товара
Подробное описание товара
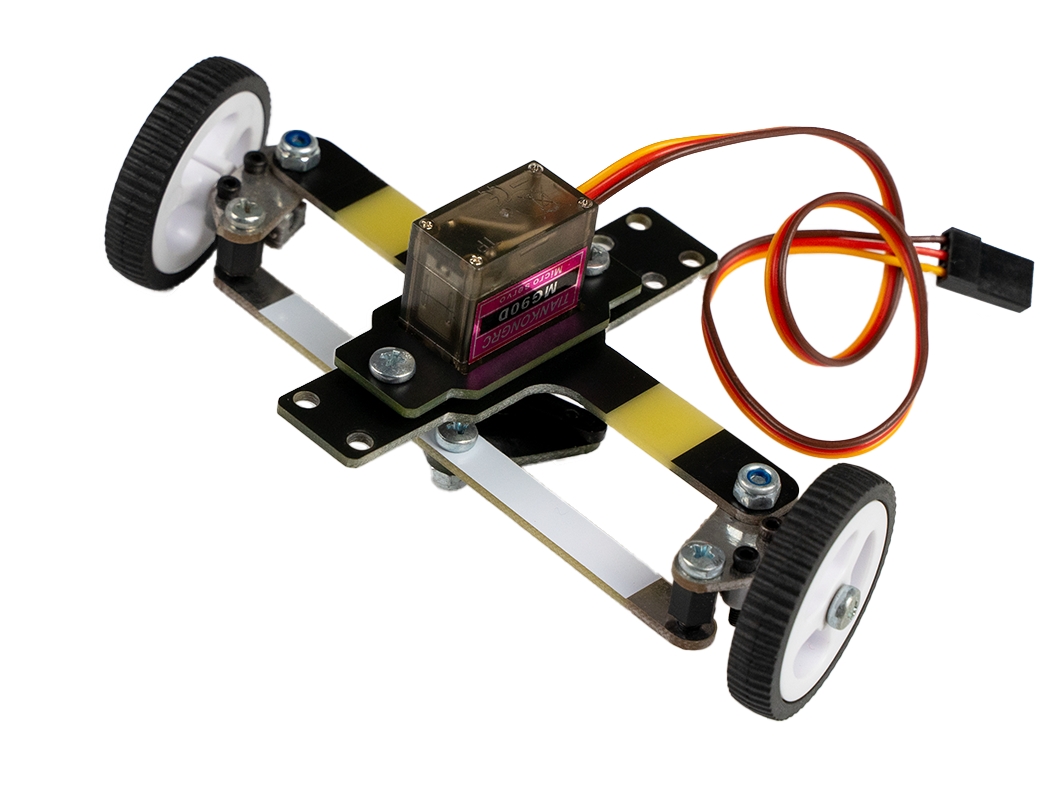
Используйте задние колёса с дифференциалом из экосистемы Roborace для вхождения в повороты машинки Roborace. Модуль позволяет вращаться задним колёсам на одной оси с разной скоростью с сохранением непрерывного потока крутящего момента.
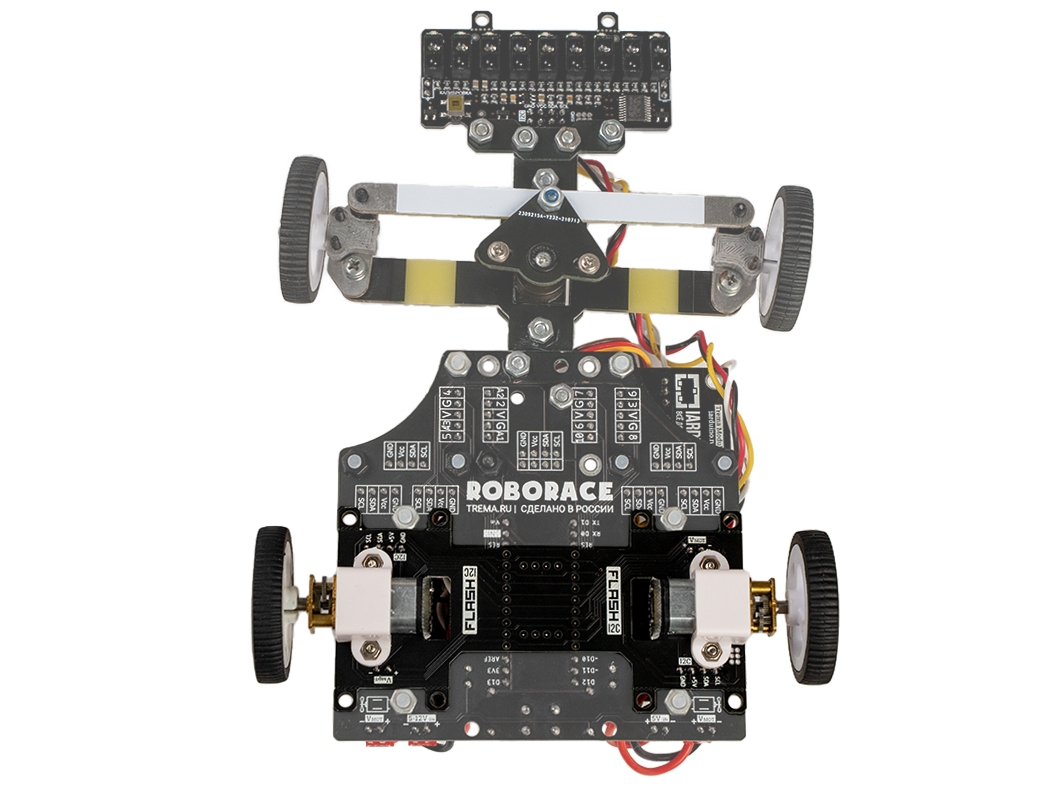
Задние колёса с дифференциалом отлично сочетаются с передними поворотными колёсами в рулевом методе управление машинкой Roborace.
Видеообзор
Подробности про Roborace
В современном мире умной робомашинкой никого не удивишь. Мы же пошли дальше и создали экосистему Roborace, в которой вы сами творец автомобиля и его тюнинга.
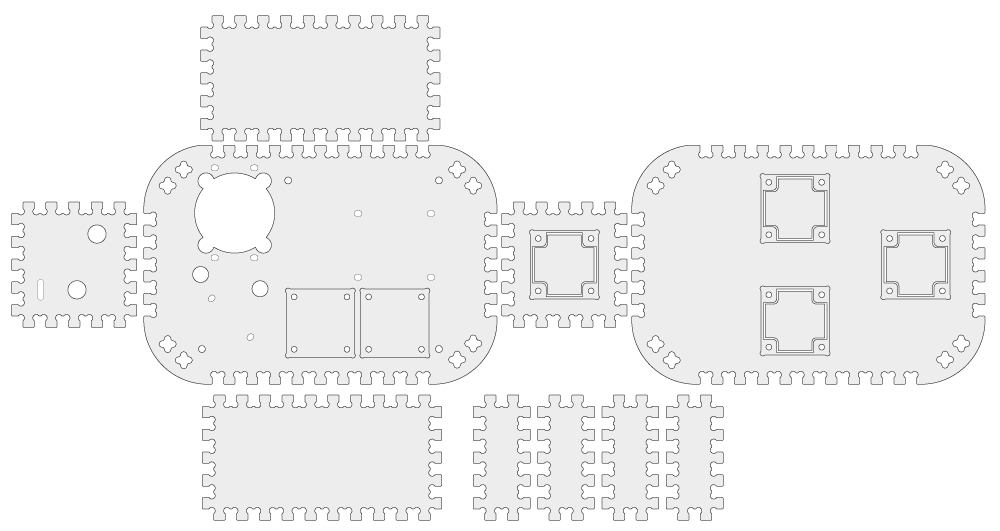
В центре системы базовая плата основания на выбор: Roborace или Roborace MiniQ. Для минимального старта к выбранной робоплатформе понадобится добавить базовый сет компонентов:
- Arduino Nano в качестве мозга системы.
- Модуль питания в роли аккумулятора автомобиля.
- Пару моторов с колёсами для придачи машинки в движения.
- Шаровая опора для балансирования робоплатформы.
Однако это только вершина айсберга, добавьте к машинке:
- Дальномер HC-SR04 для определения расстояние до препятствия.
- Бампер с датчиками линий для определения езды по дороге и детектирования обрыва.
- Датчик касания для фиксации препятствий путём физического контакта.
- Поворотные колёса для задания поворотов влево и вправо.
- Задние колёса с дифференциалом для прохождения поворотов с одинаковым усилием.
- Светодиодную матрицу для индикации событий.
- И многое другое.
Возможности тюнинга в машинке Roborace ограничены лишь вашим воображением.

Однако мы рекомендуем взять готовый набор Roborace, где мы всё собрали в одной коробке с увлекательной инструкцией по сборке и обучению программированию.

Всё это поможет вам создать свою собственную уникальную робомашинку, которая будет работать конкретно по вашей идеи и алгоритму.
Методы управления машинкой
Исторически в робототехнике сложилось, что мобильные робоплатформы бывают:
- Двухколёсные с балансирующей шаровой опорой в роли третьего ролика.
- Многоколёсные, где колёса механически связаны между собой в два тракта: левый тракт и правый тракт.
Все такие платформы для поворота используют дифференциальное управление — это когда поворот машинки достигается путём увеличение или уменьшение скорости одного из колёс в двухколёсной платформе или одного из трактов в многоколёсной платформе. В реальной жизни такой способ управления используют гусеничные машины, бульдозеры, танки и другие схожие средства передвижения.

Привычные же нам автомобили для поворота используют рулевое управление — это когда поворот машинки достигается путём поворота передних колёс влево-вправо.

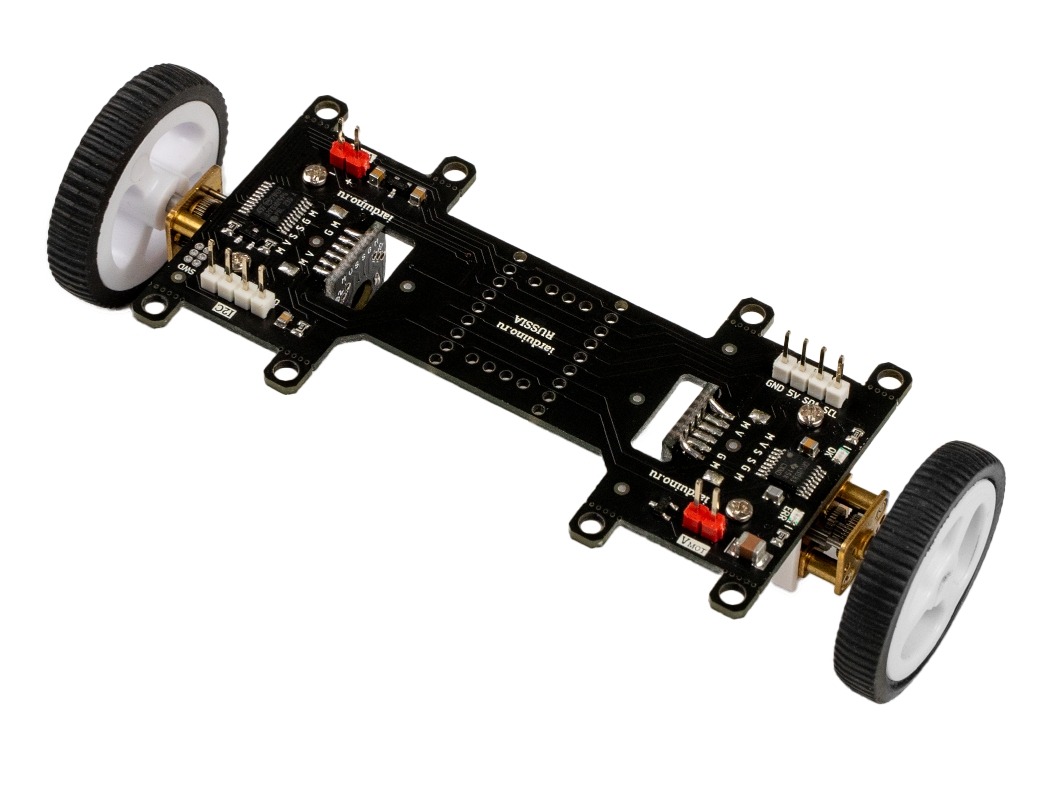
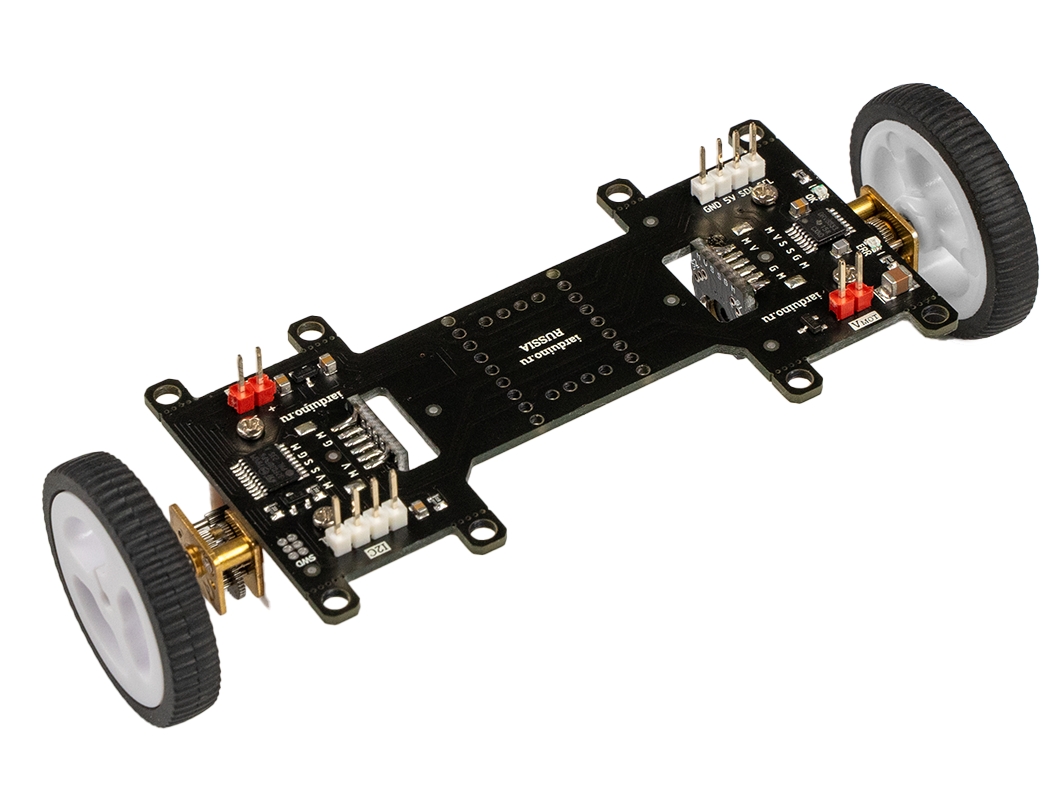
Задние колёса с дифференциалом Roborace
В рулевом методе управления при повороте платформы влево или вправо нужно использовать дифференциал. Роль дифференциала — обеспечивать возможность вращения задних колёс на одной оси с разной скоростью с сохранением непрерывного потока крутящего момента. Для получения дифференциала нужно соединить два мотора последовательно и управлять ими как единым двигателем с одной педалей газа.
- Задние колёса с дифференциалом: моторы соединены последовательно и управляются как единый двигатель.
- Задние колёса без дифференциала: моторы не соединены последовательно и управляются как отдельные двигатели.
Мы решили учесть момент последовательного соединение моторов на платформе Roborace для рулевого управления и выпустили задние колёса с дифференциалом Roborace.

Используйте поворотные передние колёса Roborace только в связке с задними колёсами с дифференциалом. Если использовать подключение двух независимых моторов отдельно без дифференциала — передние колёса Roborace будут проскальзывать и машинка будет стремится ехать прямо вне зависимости от угла поворота передних колёс.

Начинка

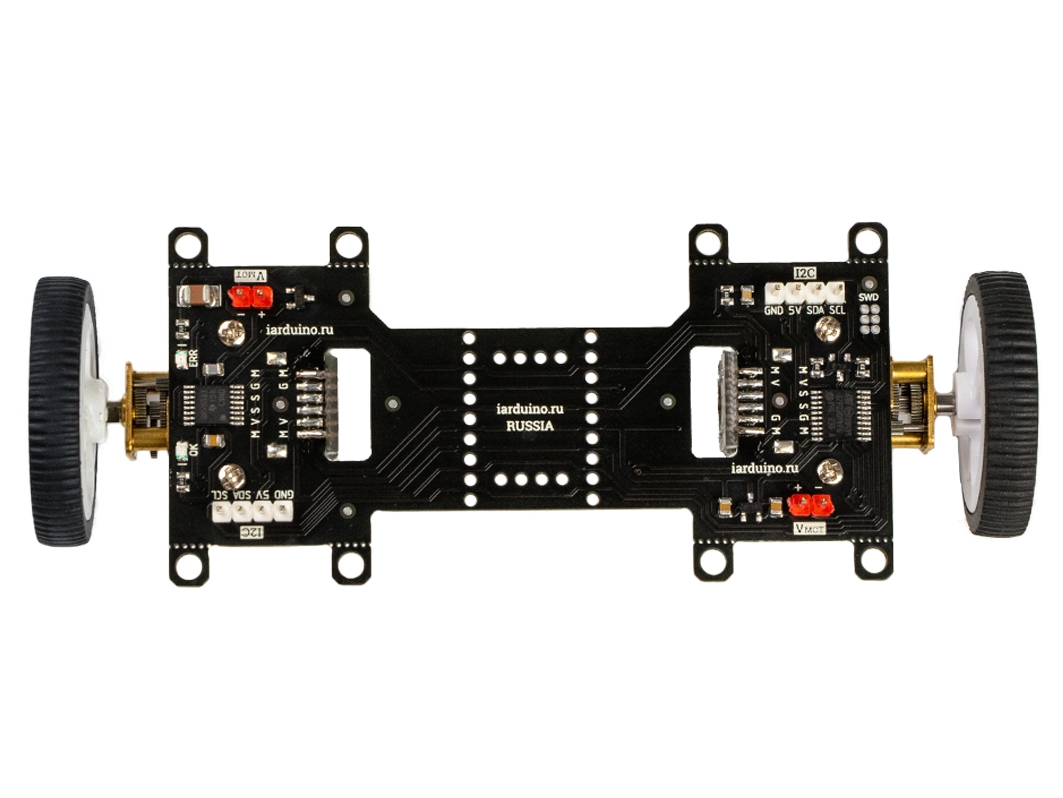
Задние колёса Roborace c дифференциалом — это два соединенных последовательно мотора Flash-I²C.
Модуль относится к линейке Flash-I²C с адресом 0x09, который можно изменять программно. За получения информации от внешнего контроллера отвечает микроконтроллер STM32F030F4, который рулит драйвером моторов DRV8833, к которому подключено два двигателя GM12-N20 соединённых последовательно в одну цепь.
На плате два контура питания:
- Питание моторов: подводиться через разъём 2×PLS. Для коммуникации понадобится шлейф питания «мама-мама» (2 pin).
- Питание логики: подводится через разъём 4×PLS. Для коммуникации понадобится шлейф «мама-мама» (4 pin).
На модуле выведено по два дублирующих разъёма питания моторов 2×PLS и питания логики 4×PLS. Это сделано для удобства коммуникации.
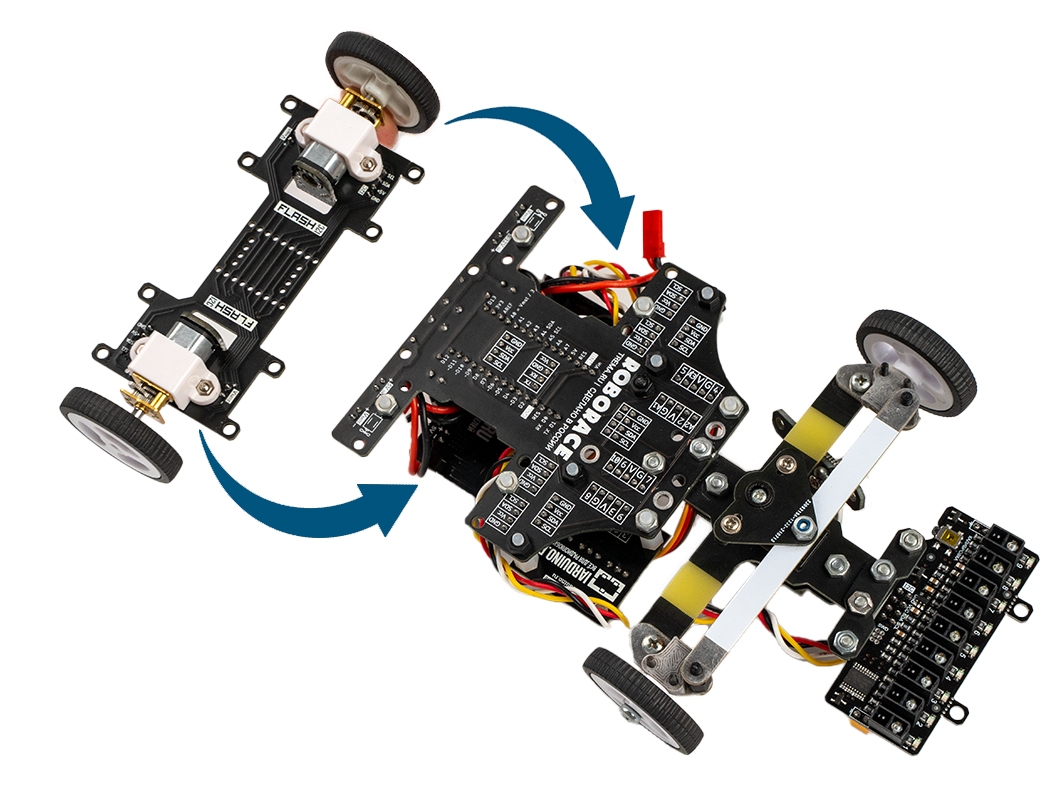
Подключение и программирование
- Прикрутите задние колёса с дифференциалом Roborace к основанию платформы Roborace взамен штатных моторов. Для сборки рекомендуем использовать отвёртку.
- Подключите питание моторов шлейфом питания «мама-мама» (2 pin) и питание логики шлейфом «мама-мама» (4 pin).
- Вот и всё робоплатформа Roborace готова входить в любые повороты на треке.


Платформа Roborace в комплект не входит.
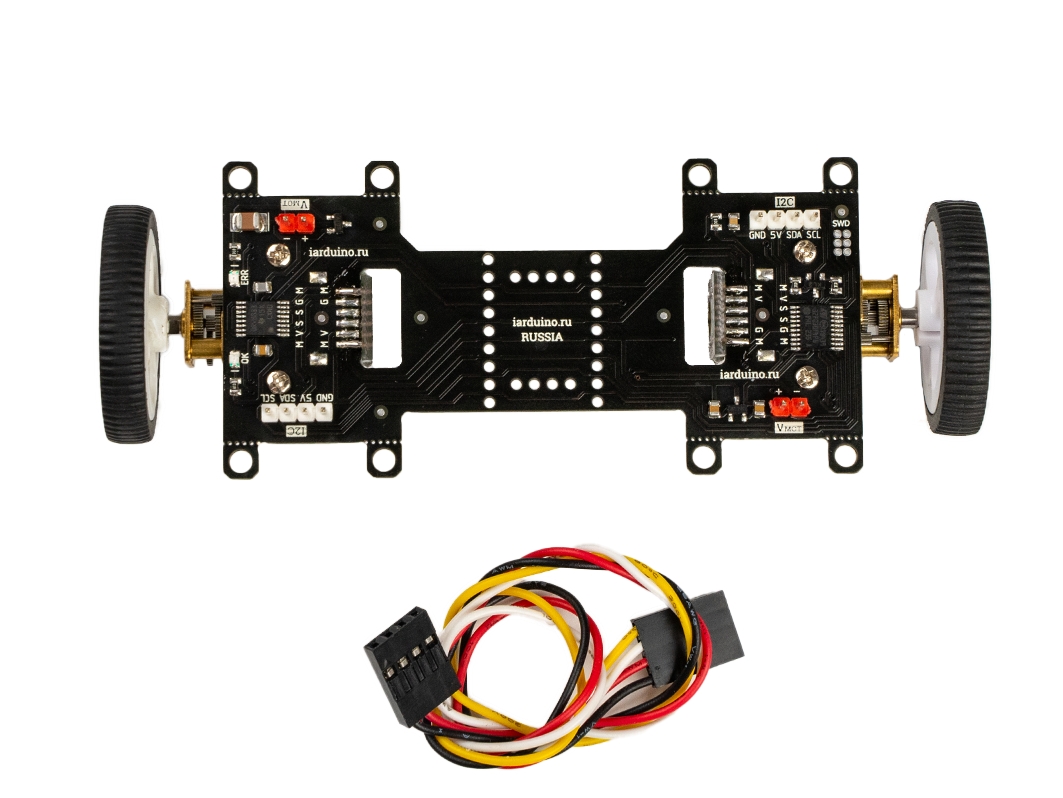
Комплектация
- 1× Задние колёса с дифференциалом Roborace
- 1× Шлейф «мама-мама» (4 pin)
Характеристики
Общие
- Модель: Задние колёса с дифференциалом Roborace
- Совместимость: платформа Roborace
- Чип: микроконтроллер STM32F030F4
- Драйвер моторов: DRV8833
-
Моторы
- Количество моторов: два с последовательным соединением (для дифференциала)
- Модель двигателей: GM12-N20
- Тип двигателей: коллекторный
- Материал шестерней редуктора: металл
- Передаточное соотношение: 1:300
- Диаметр выходного вала: 3 мм
-
Контакты питания моторов:
- Аппаратный интерфейс: 2×PLS
- Напряжение питания: 2,7–12 В
-
Контакты питания логики:
- Аппаратный интерфейс: 4×PLS
- Напряжение логики: 3,3–5 В
- Программный интерфейс: I²C
- I²C-адрес: 0x09
Ресурсы
Мы также рекомендуем к чтению ссылки на статьи, документации и другие вспомогательные материалы по платформе Roborace.
Инструкции
- Введение в платформу Roborace
- Руководство по использованию мотора GM12-N20 (Flash-I²C)
- Расширенные возможности библиотек iarduino для шины I²C
Магазин
- Образовательный набор Roborace
- Ультразвуковой дальномер Roborace HC-SR04
- Датчик касания Roborace
- Бампер с датчиками линии (Узкий)
- Бампер с датчиками линии (Широкий)
- Поворотные колёса Roborace (Узкая колея)
- Поворотные колёса Roborace (Штатная колея)
- Задние колёса с дифференциалом Roborace
- Комплект знаков для домашнего курса Roborace