МЫ СОЗДАЕМ И ПРОИЗВОДИМ
ЭЛЕКТРОННЫЕ НАБОРЫ И МОДУЛИ !













")
Описание товара
Подробное описание товара
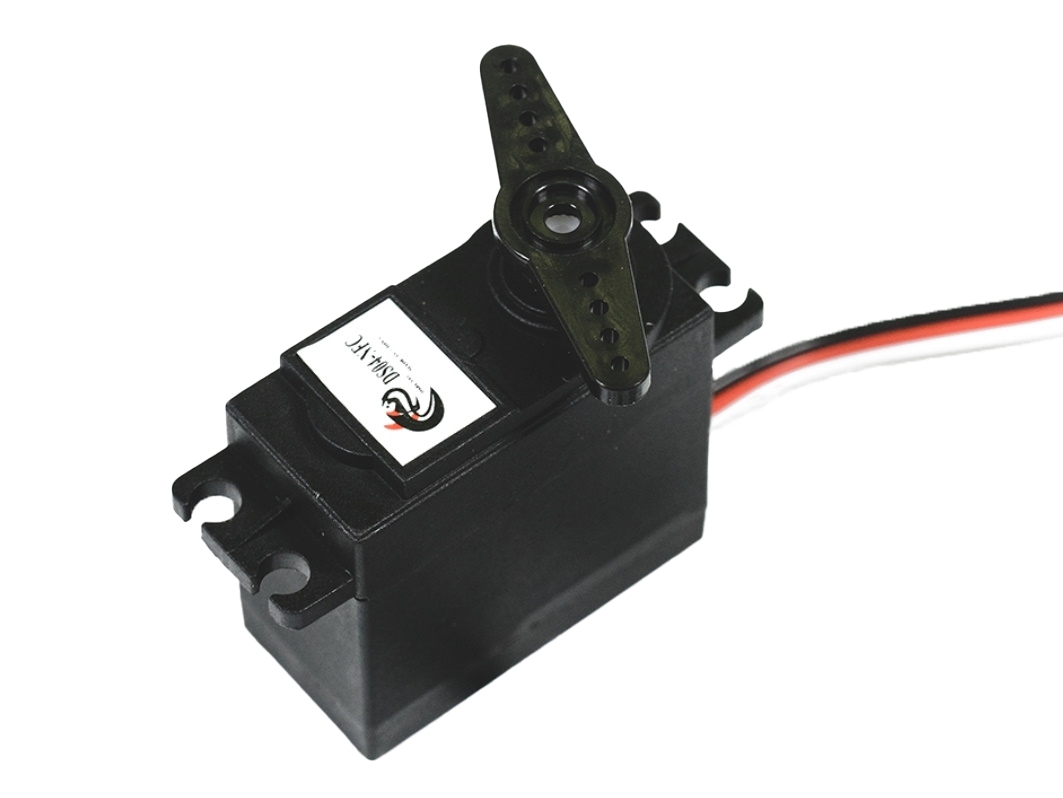
Используйте привод для создания многооборотных столов для 3D-витрин, вращения различных механизмов с регулировкой скорости и в качестве колёс при создании мобильных роботов. Аналоговый мотор DS04-NFC управляется по сигналу PDM (Pulse Duration Modulation), способен поддерживать скорость вращения вала до 45 оборотов в любом направлении без ограничений по углу поворота и обладает крутящим моментом до 5,5 кг·см.
Общие сведения
Привод постоянного вращения — это электродвигатель, редуктор и блок управления в одном корпусе.

Привод DS04-NFC способен поддерживать скорость вращения вала до 45 оборотов в любом направлении без ограничений по углу поворота. За обработку сигнала отвечает аналоговый блок управления на логических элементах, который сравнивает текущее и необходимое положения вала, и на основании разницы даёт команду на направления и скорость вращения. А встроенный редуктор из пластиковых шестерней позволяет развить приводу крутящий момент до 5,5 кг·см.
Не прилагайте к валу мотора нагрузки, которые больше крутящего момента. Это может привести к разрушению редуктора.
В комплектации привода идут насадки разных форм-факторов, которые надеваются на вал мотора для дальнейшего соединения с механизмами ваших устройств.

Обратите внимание, даная модель способна поддерживать скорость вращения вала до 120 оборотов в любом направлении без ограничений по углу поворота. Если вам нужен мотор, способный поворачиваться на заданный угол и удерживать его, возьмите сервопривод Tower Pro MG995 или TianKongRC TD-8120MG.
В робототехнике, приводы — это идеальное решение для создания самых разнообразных роботизированных систем.
Подключение и питание
Привод постоянного вращения DS04-NFC подключается к контролерам управления через выходной шлейф из трёх проводов.
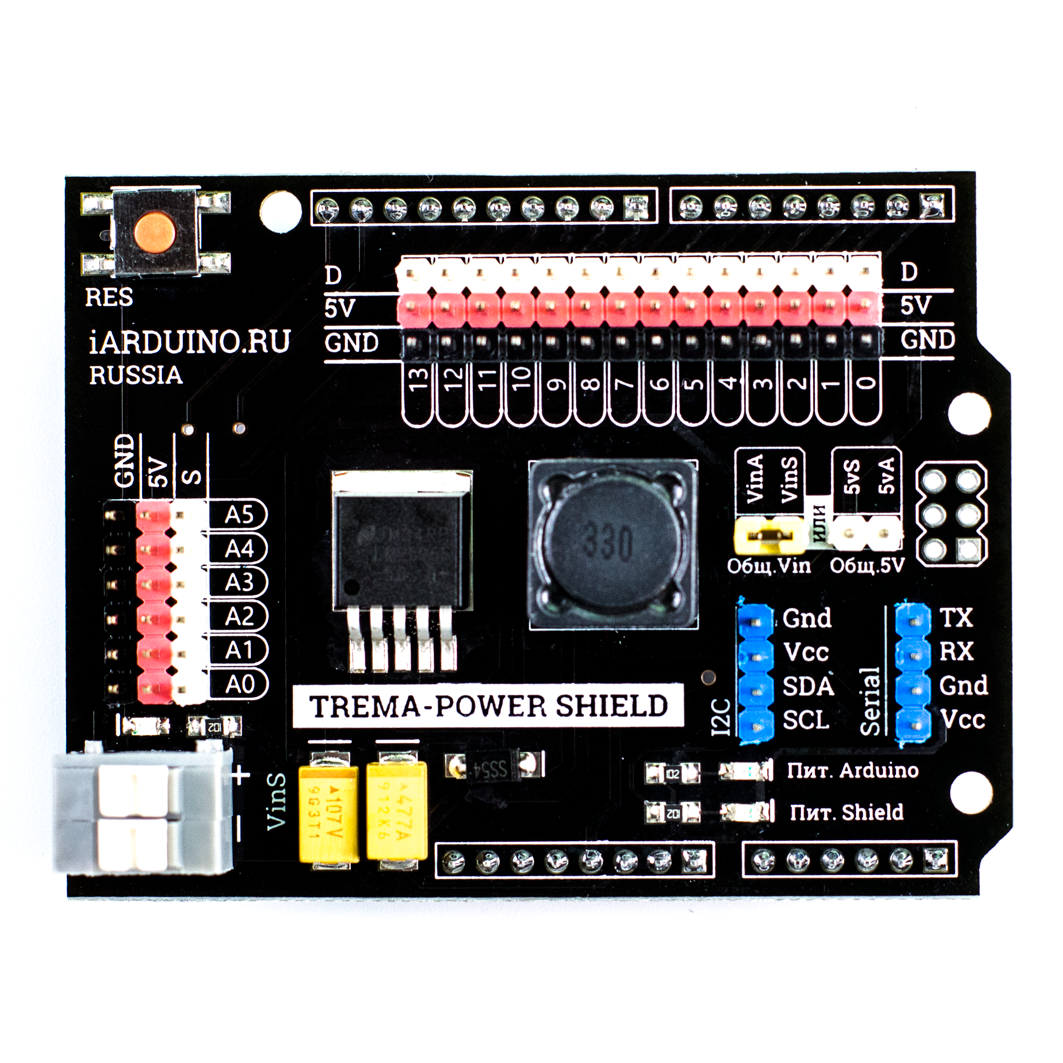
- При подключении к платам форм-фактора Arduino рекомендуем обратить внимания на Trema Shield и Trema Power Shield. А чтобы одновременно управлять множеством приводов, не занимая ценные пины контроллера, используйте Multi Servo Shield.
- При подключении к компьютерам Raspberry Pi пригодится Trema Expander HAT.
Напряжение к мотору можно подключать двумя способами: без внешнего источника питания и с внешним источником питания. Модель DS04-NFC питается напряжением от 4,8 до 6 вольт с потреблением тока до 1 А. Будьте внимательны при выборе источника питания.
Все подробности по подключению и питанию привода DS04-NFC читайте в наших статьях на вики для Arduino и Raspberry Pi.
Программирование
Для управления мотором необходимо подавать особый сигнал PDM (Pulse Duration Modulation) — импульсы постоянной частоты и переменной ширины. Однако вы можете не вникать в детали программного управления, используйте готовые библиотеками для работы с сервомоторами:
Все подробности по управлению приводом DS04-NFC читайте в наших статьях на вики для Arduino и Raspberry Pi.
Доступные альтернативы
- Если нужен мотор более меньшего размера и соответственно c меньшим крутящим моментом, возьмите микропривод постоянного вращения Tower Pro SG90.
- Если нужен мотор, способный поворачиваться на заданный угол и удерживать его, возьмите сервопривод Tower Pro MG995 или TianKongRC TD-8120MG.
Габаритный чертёж

Комплектация
- 1× Привод постоянного вращения DS04-NFC
- 1× Комплект насадок
- 1× Комплект крепежа
Характеристики
- Модель: Привод DS04-NFC
- Тип привода: постоянное вращения
- Диапазон поворота вала: постоянное вращения 360°
- Максимальная скорость вращения вала: 45 об/мин (360° за 1,32 сек)
- Диапазон ширины принимаемого импульса: 500–2500 мкс
- Крутящий момент: 5,5 кг·см
- Аппаратный интерфейс: контакты S-V-G (PBS-3)
- Программный интерфейс: PDM (Pulse-Duration Modulation)
- Внутренний обработчик сигналов: аналоговый
- Напряжение питания: 4,8–6 В
- Потребляемый ток: 170 мА
- Ток блокировки: 1000 мА
- Материал шестерней: нейлон
- Материал корпуса: пластик
- Длина кабеля: 30 см
- Размеры: 54×20×46,5 мм
- Вес: 51 г