МЫ СОЗДАЕМ И ПРОИЗВОДИМ
ЭЛЕКТРОННЫЕ НАБОРЫ И МОДУЛИ !





")

Описание товара
Подробное описание товара
Общие сведения
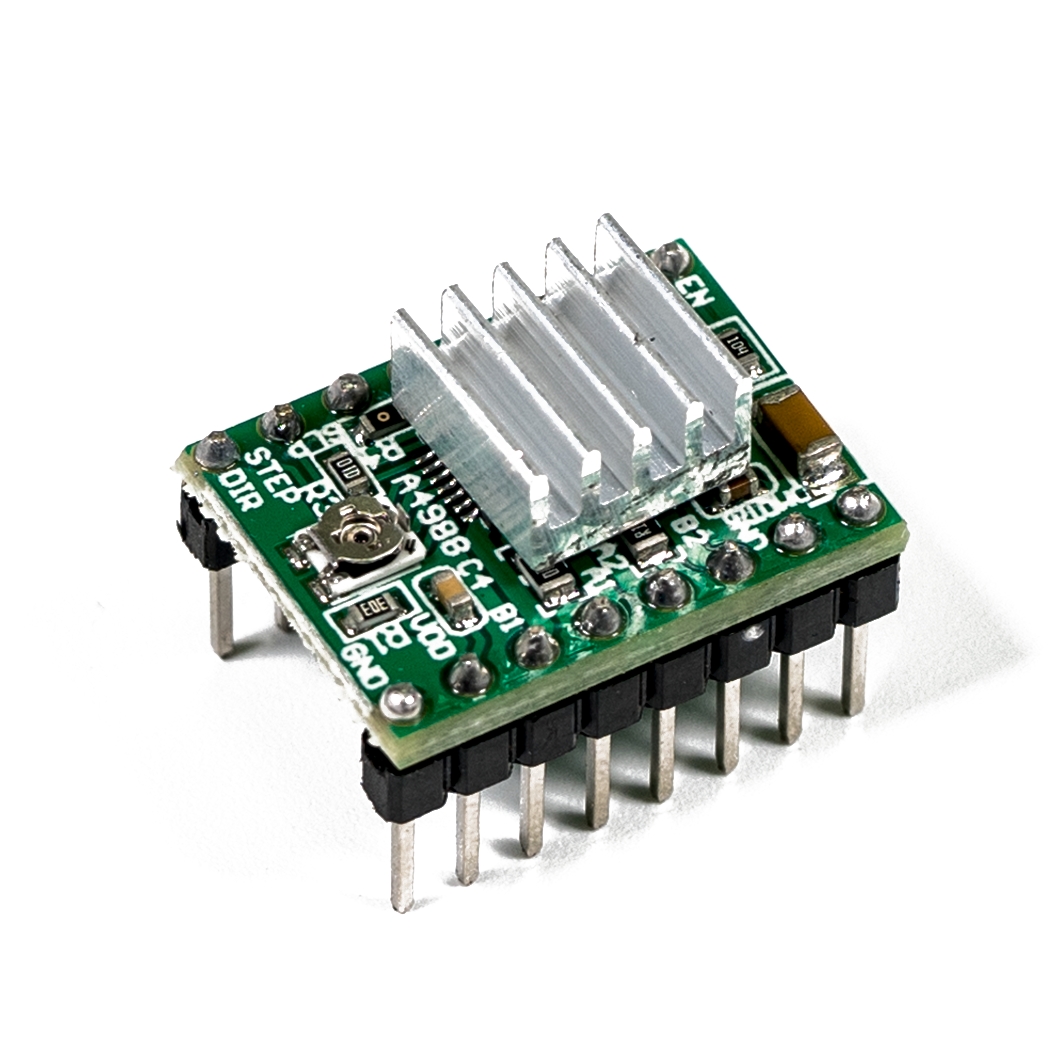
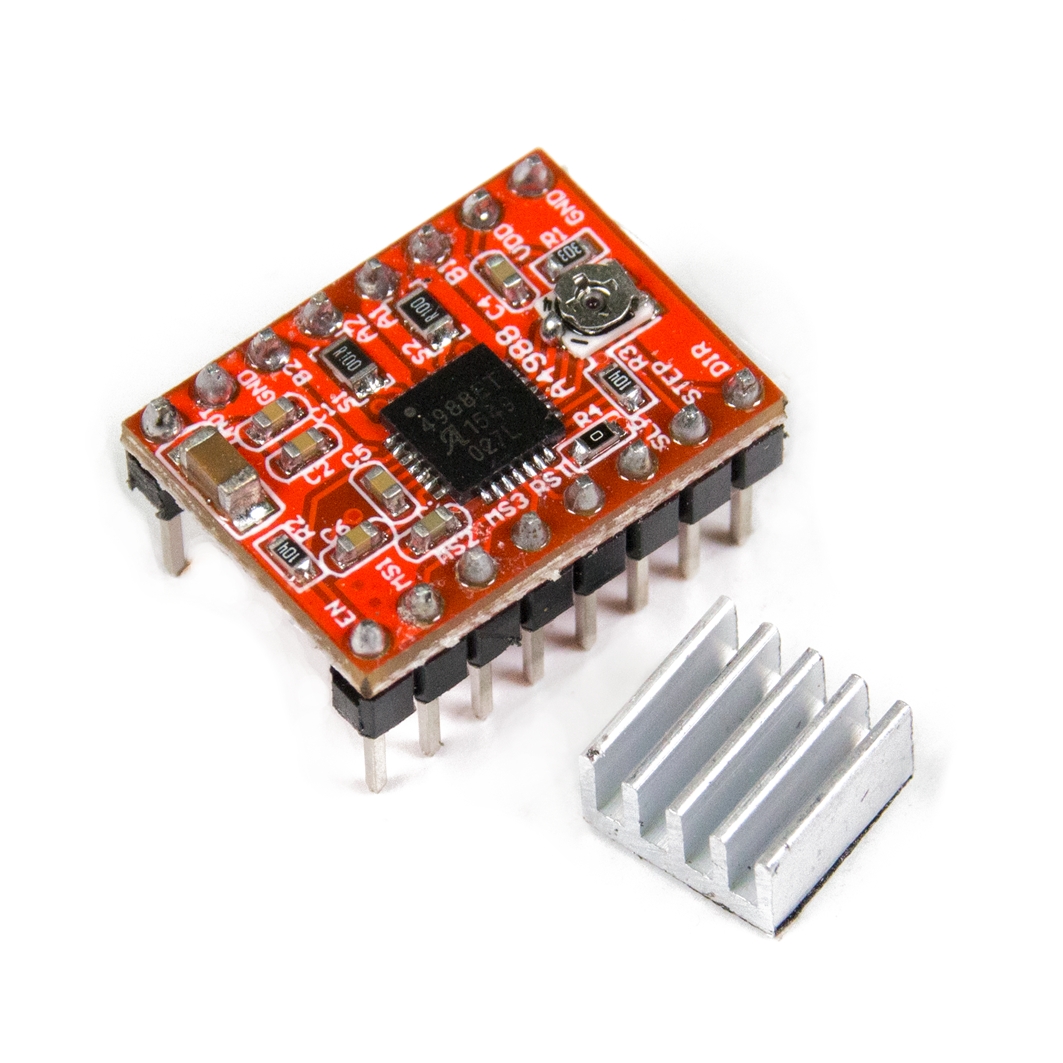
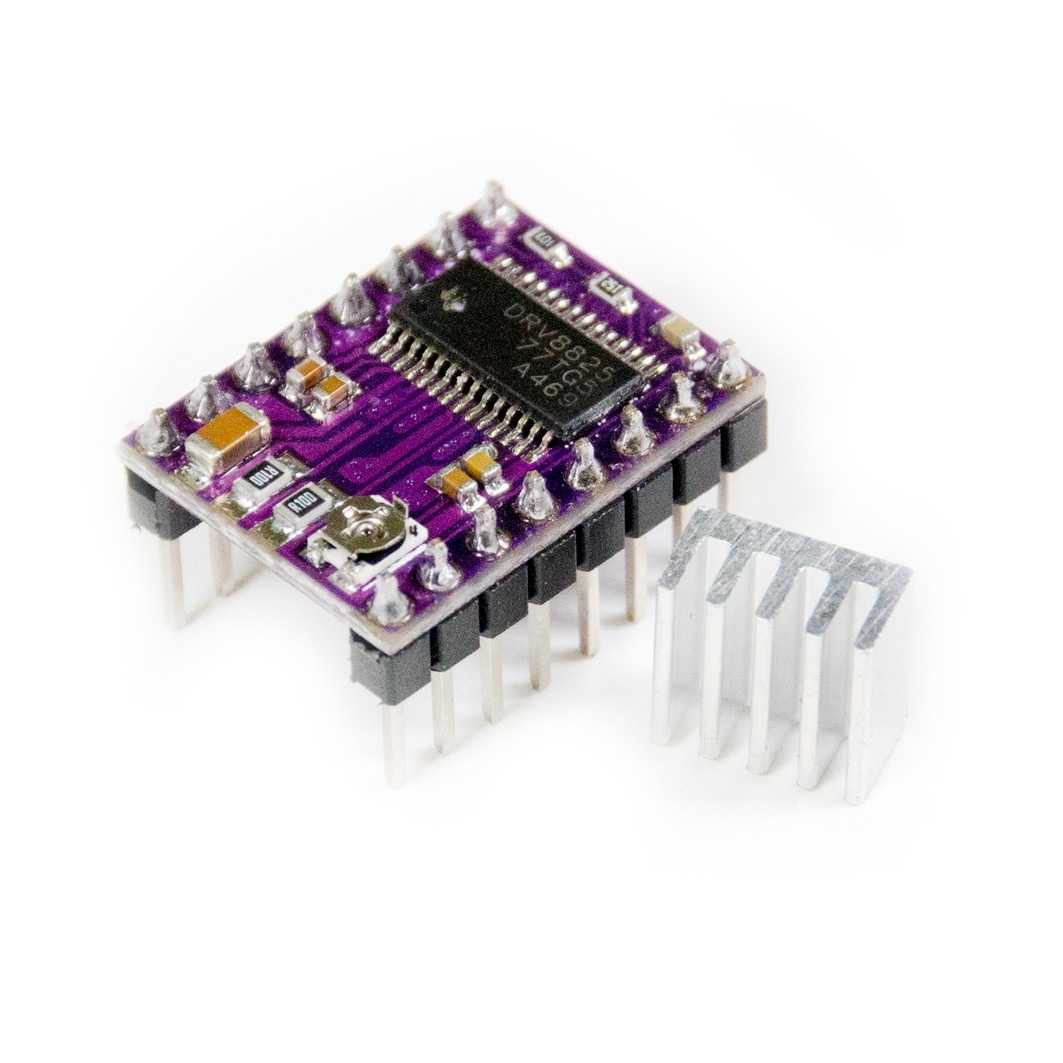
Драйвер шагового двигателя DRV8825 — предназначен для управления биполярными шаговыми двигателями, работающими от напряжения 8,2 - 45 В и потребляющими до 2,2 А на каждую обмотку двигателя. Драйвер построен на базе одноимённого чипа DRV8825 производства Texas Instruments, он получил широкое распространение (в роботостроении, станках ЧПУ, 3D принтерах и т.д) благодаря простоте подключения, широкому функционалу и совместимости с драйвером A4988.
С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki - Шаговые двигатели.
Характеристики
- Напряжение питания двигателя: 8,2 ... 45 В.
- Максимальный ток на одну обмотку двигателя: 1,5 А без радиатора, 2,2 А с радиатором.
- Напряжение питания логической части драйвера: 2,5 ... 5,25 В.
- Размер одного шага двигателя: от 1 до 1/32 полного шага.
- Защита: от перегрева и от перегрузки по току.
- Габариты платы драйвера: 20x15 мм.
- Габариты радиатора: 9x5x9 мм.
Подключение
Для удобства подключения к Arduino воспользуйтесь Trema Shield, Trema Power Shield, Motor Shield или Trema Set Shield.

Питание
- Напряжение питания логической части драйвера, от 2,5 до 5,25 В постоянного тока.
- Напряжение питания двигателя, от 8,2 до 45 В постоянного тока.
Подробнее о драйвере
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
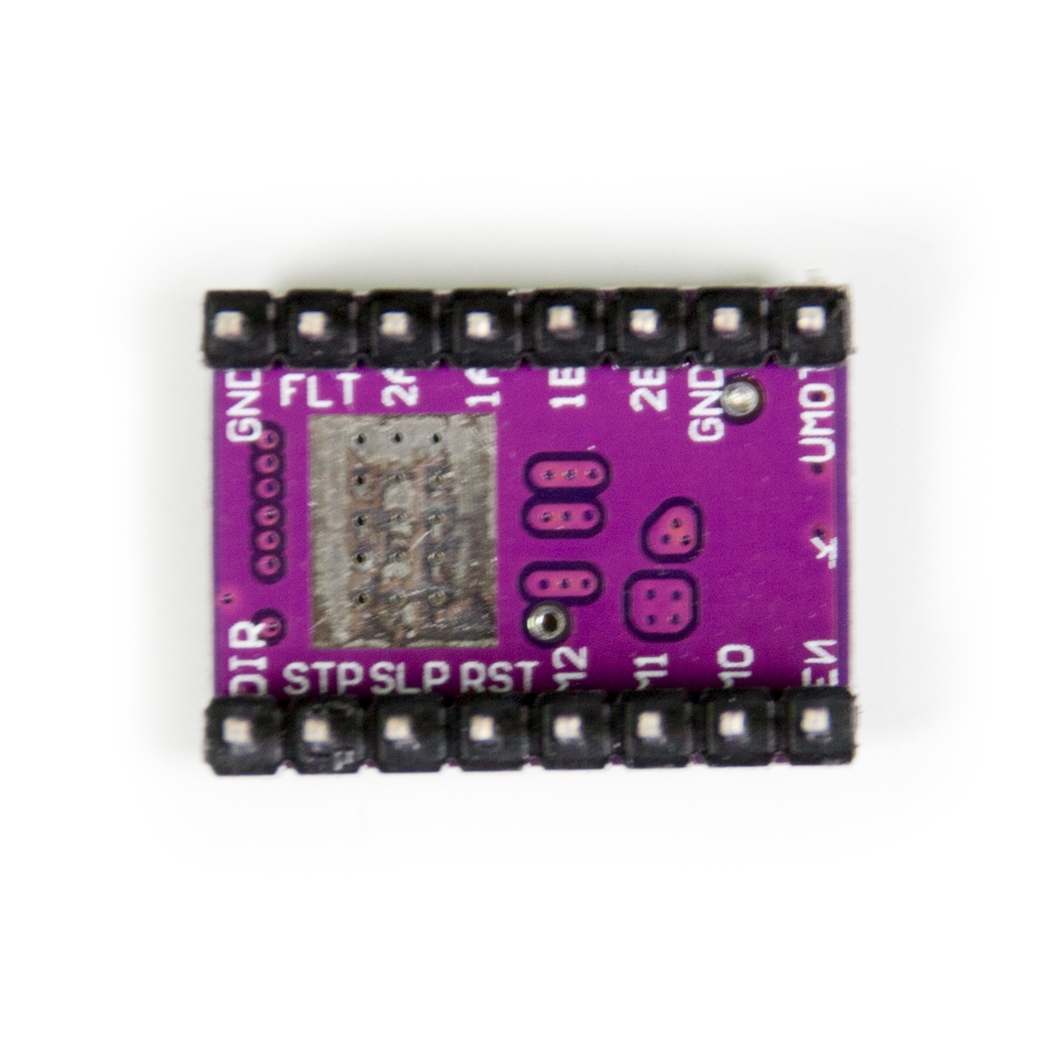
Управление шаговым двигателем осуществляется через входы «ENABLE», «STEP» и «DIR» драйвера (если считать, что на выводах «RESET» и «SLEEP» установлен уровень логической «1»). Подача логического «0» на вход «ENABLE» разрешает работу драйвера. С каждым фронтом импульса на входе «STEP», ротор двигателя будет поворачиваться на один шаг, направление поворота которого будет зависеть от логического уровня на входе «DIR».
Пример для двигателя 17HS1352-P4130 в полношаговом режиме:
- Для разрешения работы драйвера, необходимо установить уровень логического «0» на входе «ENABLE» (так как вход инверсный).
- У двигателя 17HS1352-P4130, один оборот ротора состоит из 200 полных шагов, значит за один полный шаг ротор повернётся на 1,8° (360° / 200 шагов).
- Если подать на вход «STEP» 400 импульсов, при наличии логической «1» на входе «DIR», то ротор двигателя совершит два полных оборота в одну сторону.
- Если подать на вход «STEP» 400 импульсов, при наличии логического «0» на входе «DIR», то ротор двигателя совершит два полных оборота в другую сторону.
- Чем выше частота следования импульсов на входе «STEP», тем быстрее будет осуществляться поворот ротора.
- Если работа драйвера разрешена (на входе «ENABLE» уровень логического «0») и на вход «STEP» не поступают импульсы, то ротор двигателя будет удерживаться в одном и том же положении, вне зависимости от уровня на входе «DIR». Удержание ротора означает что его трудно (или невозможно) повернуть прикладывая внешнюю физическую силу.
- При подаче логической «1» на вход «ENABEL», драйвер отключится и ротор двигателя освободится, вне зависимости от состояния на остальных входах драйвера.
Ограничение максимального тока двигателя
Если на двигатель подать напряжение выше его номинального значения, это приведёт к увеличению скорости шага. Но увеличение напряжения приведёт и к увеличению силы тока, а превышение максимального тока двигателя, выведет его из строя.
Но драйвер DRV8825 позволяет ограничивать максимальный выходной ток двигателя (настраивается подстроечным резистором на плате драйвера). Таким образом можно увеличить напряжение в сети питания двигателя, предварительно ограничив выходной ток, по следующей формуле:
IMAX = VREF * 2, следовательно, VREF = IMAX / 2 , где:
- IMAX - максимальный ток выдаваемый драйвером (не должен превышать номинальный ток двигателя).
- VREF - опорное напряжение (регулируется подстроечным резистором).
Это напряжение можно измерить между любым выводом GND и центральным выводом подстроечного резистора (металлическая вращающая часть).
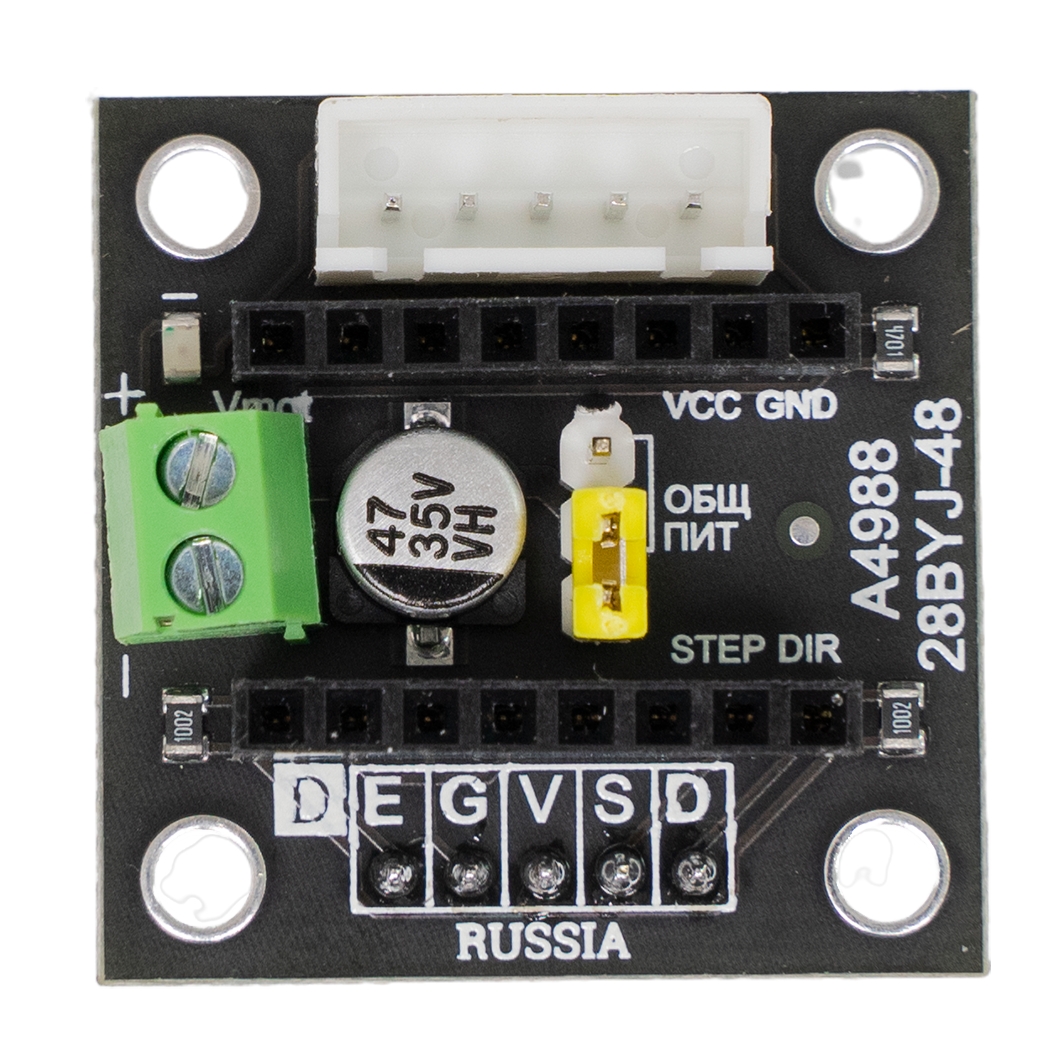
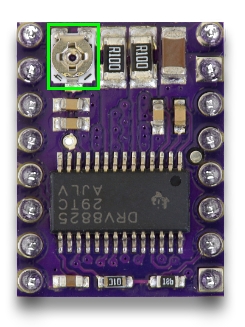 | Расположение деталей на плате драйвера Зелёным цветом обведён подстроечный резистор, для регулировки опорного напряжения VREF. |
Из представленной выше формулы ясно, что ограничение максимального тока зависит только от опорного напряжения. Настройка опорного напряжения VREF осуществляется подстроечным резистором, без подачи питания двигателя VMOT (настройку можно выполнять даже при отключённом от драйвера двигателе).
Пример
Настройка ограничения максимального тока для двигателя с номинальным током в 1 А.
IMAX = 1 А.
VREF = IMAX / 2 = 1 / 2 = 0,5 В.
Подаём питание логической части драйвера, но не подаём питание двигателя VMOT. Подключаем вольтметр черным щупом к любому выводу GND, а красным щупом к центральному выводу подстроечного резистора (металлическая вращающая часть). Поворачивая вращающуюся часть подстроечного резистора, добиваемся показаний на вольтметре = 0,5 В. Теперь можно подать питание двигателя VMOT. Ток протекающий через его обмотки не будет превышать 1 А.
Комплектация
- 1x Драйвер DRV8825;
- 1x Радиатор;