МЫ СОЗДАЕМ И ПРОИЗВОДИМ
ЭЛЕКТРОННЫЕ НАБОРЫ И МОДУЛИ !





")
Описание товара
Подробное описание товара
Общие сведения
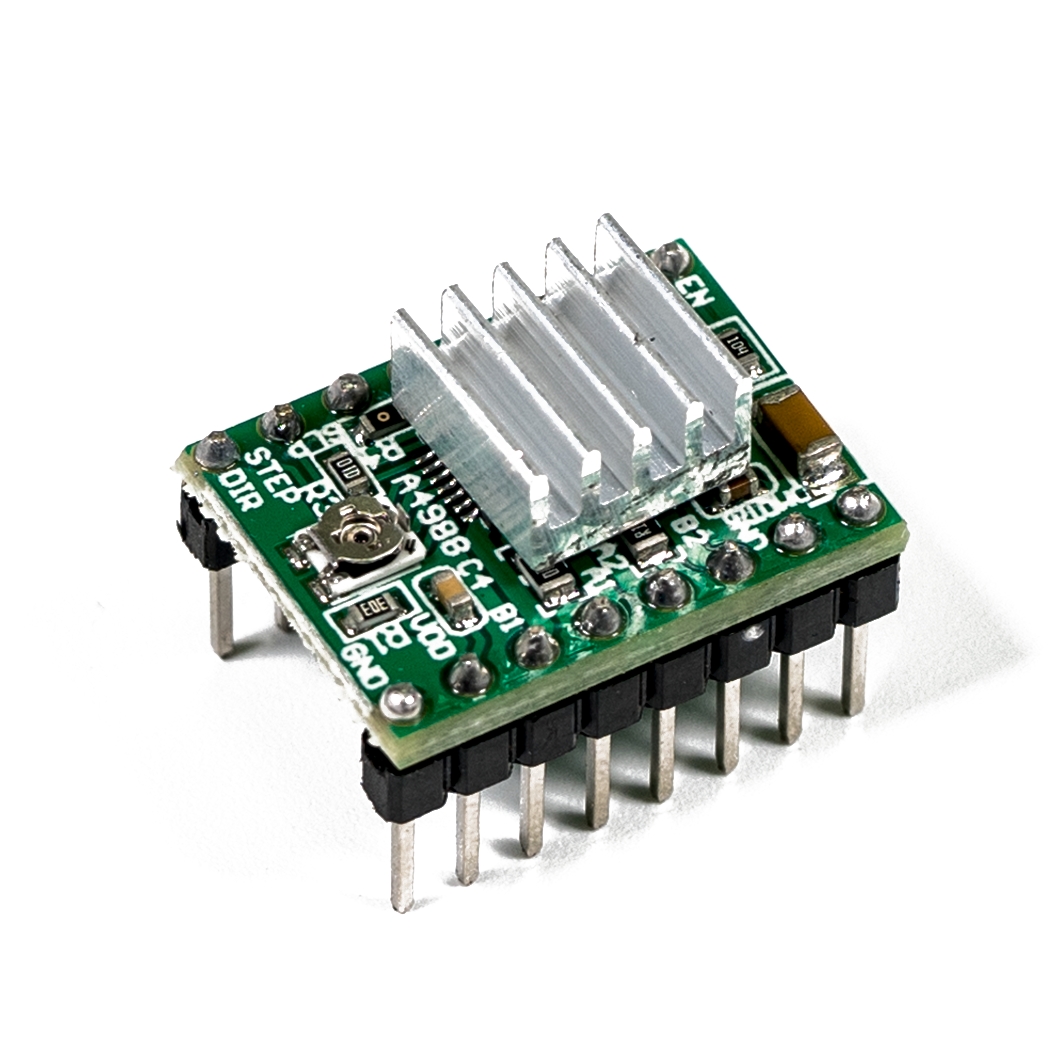
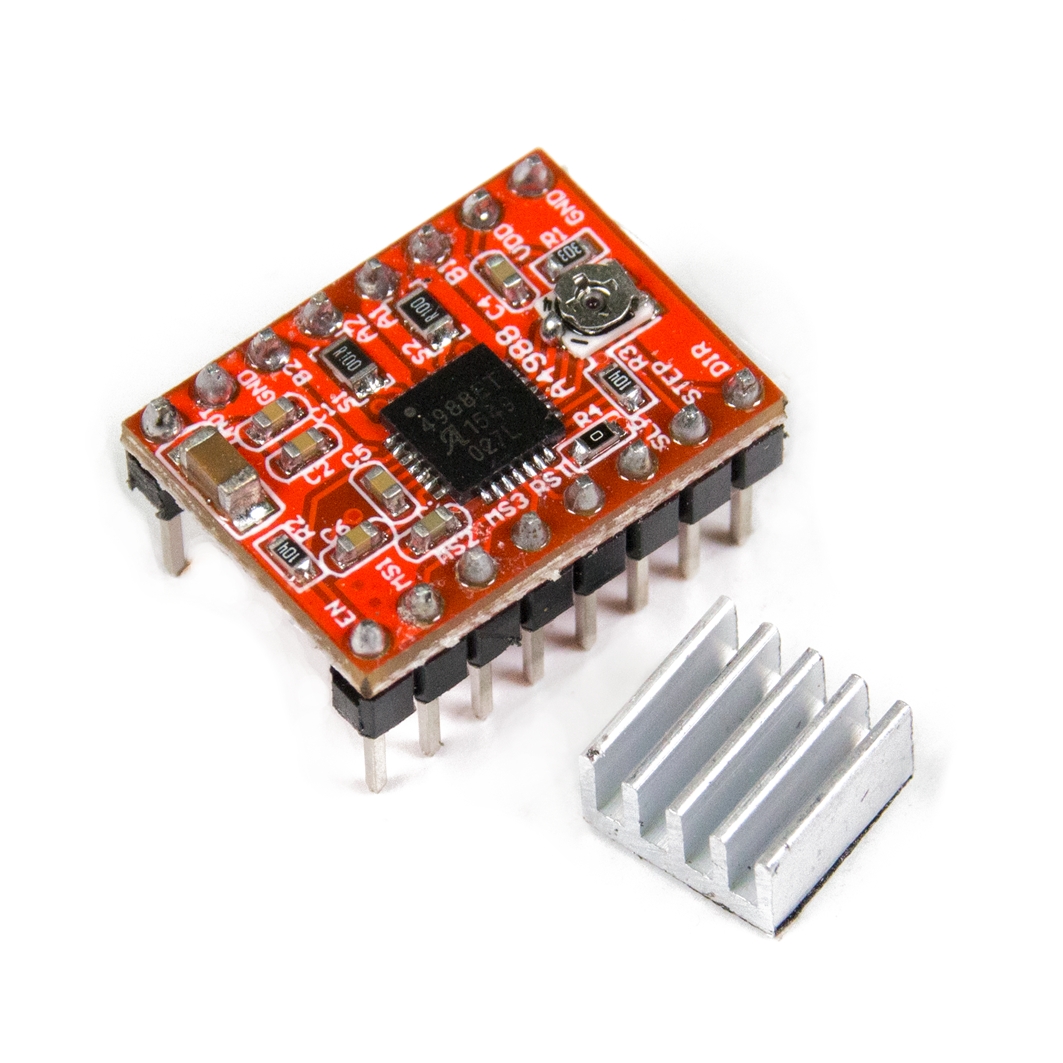
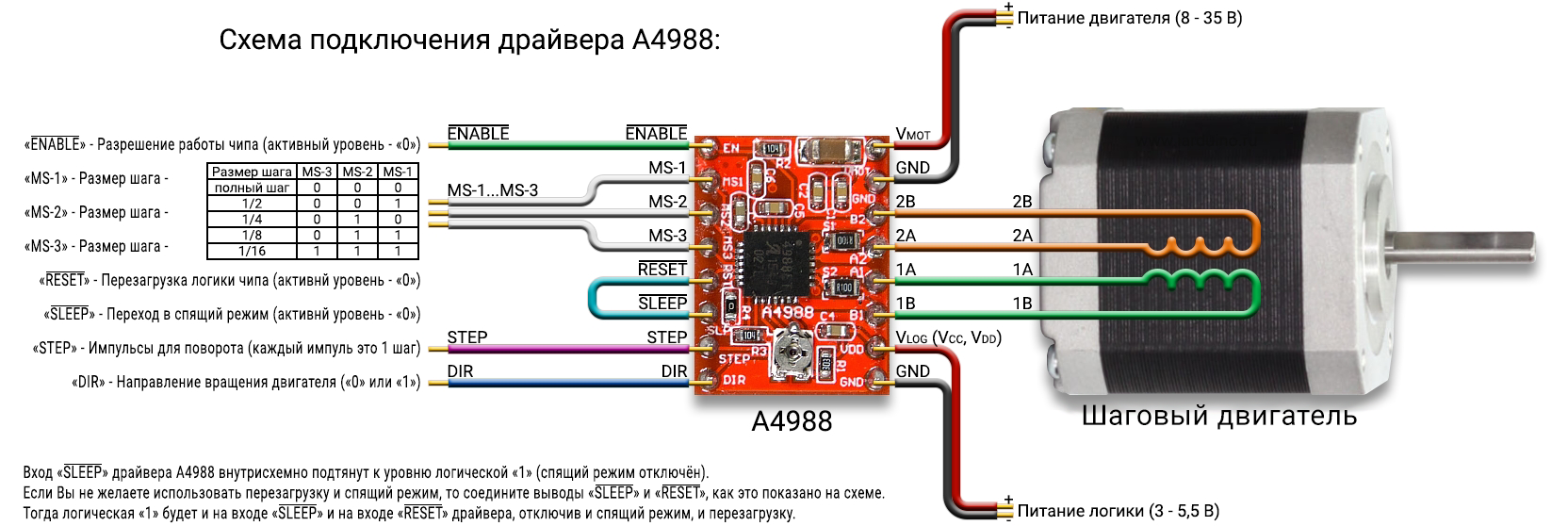
Драйвер шагового двигателя A4988 — предназначен для управления биполярными шаговыми двигателями, работающими от напряжения 8 - 35 В и потребляющими до 2 А на каждую обмотку двигателя. Драйвер построен на базе одноимённого чипа A4988 производства Allegro, он получил широкое распространение (в роботостроении, станках ЧПУ, 3D принтерах и т.д) благодаря простоте подключения и широкому функционалу.
С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki - Шаговые двигатели.
Характеристики
- Напряжение питания двигателя: 8 ... 35 В.
- Максимальный ток на одну обмотку двигателя: 1 А без радиатора, (2 А с радиатором)*.
- Напряжение питания логической части драйвера: 3 ... 5,5 В.
- Размер одного шага двигателя: от 1 до 1/16 полного шага.
- Защита: от перегрева, от перегрузки по току, от короткого замыкания, от пониженного питания.
- Габариты платы драйвера: 20x15 мм.
- Габариты радиатора: 9x5x9 мм.
Подключение
Для удобства подключения к Arduino воспользуйтесь Trema Shield, Trema Power Shield, Motor Shield или Trema Set Shield.
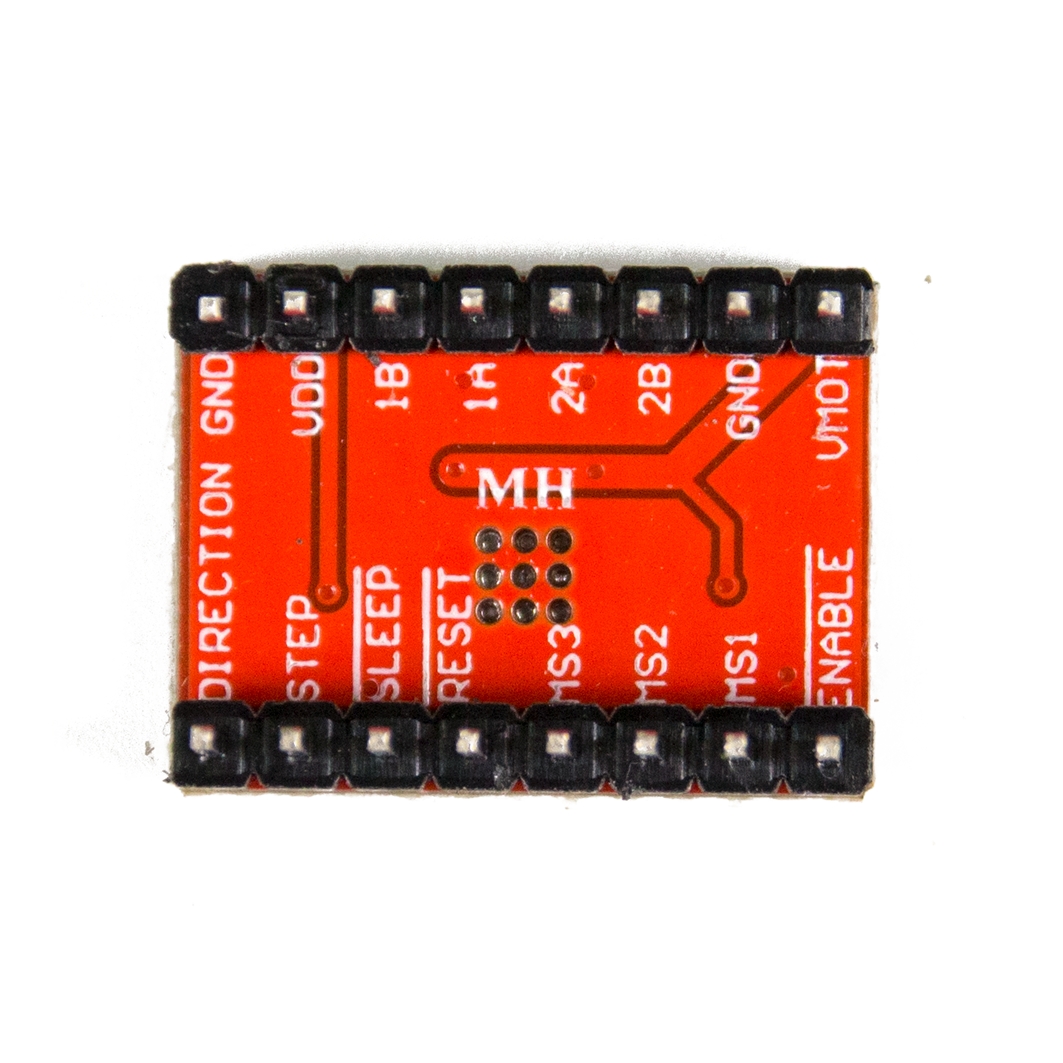
Назначение выводов драйвера
- «ENABLE» - Разрешение работы чипа («0» - разрешить работу, «1» - выключить чип).
- «MS1» ... «MS3» - Выбор размера шага (устанавливает кратность угла поворота двигателя за 1 шаг).
- «RESET» - Перезагрузка логики чипа («0» - перезагрузить, «1» - обычный режим работы).
- «SLEEP» - Перевод чипа в спящий режим («0» - сон, «1» - обычный режим работы).
- «STEP» - Вход тактовых импульсов (за один импульс двигатель поворачивается на один шаг).
- «DIR» - Выбор направления вращения двигателя («0» - в одну сторону, «1» - в другую сторону).
- «VMOT» - Питание двигателя (8 ... 35 В).
- «VLOG» - Питание логики чипа (3 ... 5,5 В).
- «1A», «1B» - Подключение первой обмотки двигателя.
- «2A», «2B» - Подключение второй обмотки двигателя.
На шине питания двигателя (между выводами VMOT и GND) рекомендуется установить электролитический конденсатор, как можно ближе к плате драйвера. Ёмкость конденсатора должна быть не ниже 1000 мкФ, а его рабочее напряжение должно превышать напряжение в шине питания двигателя минимум на 25%.
Двигатель подключается следующим образом: провода первой обмотки подключаются к выводам 1A, 1B драйвера, провода второй обмотки подключаются к выводам 2A, 2B драйвера. Если вы перепутаете обмотки двигателя (1, 2) или перепутаете начало и конец обмотки (A, B) то двигатель всё равно будет работать. Если двигатель будет вращаться в другую сторону, то поменяйте местами начало и конец (A и B) одной из обмоток (1 или 2).
Если Вы не знаете какие провода двигателя являются окончанием его обмоток, то до подключения двигателя к драйверу, выполните следующие действия: плавно вращайте ротор двигателя, поочерёдно замыкая между собой по два разных провода двигателя. Как только вы почувствуете что ротор стало тяжелее вращать, значит два замкнутых провода являются окончанием одной обмотки. Следовательно остальные два провода, являются окончанием второй обмотки.
Почему на схеме соединены выводы «RESET» и «SLEEP» драйвера? Дело в том, что вход «SLEEP» драйвера A4988 внутрисхемно подтянут к уровню логической «1» (спящий режим отключён), а вход «RESET» находится в состоянии высокого импеданса («висит», не подтянут к «1» и не прижат к «0»). Соединение выводов «SLEEP» и «RESET» приведёт к тому, что логическая «1» со входа «SLEEP» попадёт и на вход «RESET» драйвера (тот же результат можно достичь просто подав «1» на вход «RESET»). Значит и спящий режим, и перезагрузка, будут отключены, и недоступны.
Примечание
- Подключение и отключение двигателя от выводов «1A», «1B», «2A», «2B» при наличии питания двигателя VMOT может вывести драйвер из строя.
- У платы драйвера по 8 выводов с каждой стороны, если подключить питание перепутав стороны платы (повернуть плату драйвера на 180°), то она точно выйдет из строя.
Управление двигателем
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Управление шаговым двигателем осуществляется через входы «ENABLE», «STEP» и «DIR» драйвера (если считать, что выводы «RESET» и «SLEEP» соединены как на схеме). Подача логического «0» на вход «ENABLE» разрешает работу драйвера. С каждым фронтом импульса на входе «STEP», ротор двигателя будет поворачиваться на один шаг, направление поворота которого будет зависеть от логического уровня на входе «DIR».
Пример для двигателя 17HS1352-P4130 в полношаговом режиме:
- Для разрешения работы драйвера, необходимо установить уровень логического «0» на входе «ENABLE» (так как вход инверсный).
- У двигателя 17HS1352-P4130, один оборот ротора состоит из 200 полных шагов, значит за один полный шаг ротор повернётся на 1,8° (360° / 200 шагов).
- Если подать на вход «STEP» 400 импульсов, при наличии логической «1» на входе «DIR», то ротор двигателя совершит два полных оборота в одну сторону.
- Если подать на вход «STEP» 400 импульсов, при наличии логического «0» на входе «DIR», то ротор двигателя совершит два полных оборота в другую сторону.
- Чем выше частота следования импульсов на входе «STEP», тем быстрее будет осуществляться поворот ротора.
- Если работа драйвера разрешена (на входе «ENABLE» уровень логического «0») и на вход «STEP» не поступают импульсы, то ротор двигателя будет удерживаться в одном и том же положении, вне зависимости от уровня на входе «DIR». Удержание ротора означает что его трудно (или невозможно) повернуть прикладывая внешнюю физическую силу.
- При подаче логической «1» на вход «ENABEL», драйвер отключится и ротор двигателя освободится, вне зависимости от состояния на остальных входах драйвера.
Примечание
Входы «STEP» и «DIR» не имеют внутрисхемной подтяжки к «1» или «0». Значит их нельзя оставлять не подключёнными.
Выбор размера шага двигателя
В предыдущем разделе указано, что один оборот ротора осуществляется за определённое количество шагов. Но шаговыми двигателями можно управлять не только в полношаговом режиме (1 шаг за такт), а еще и в полушаговом (1/2 шага за такт), и микрошаговом (1/4, 1/8, 1/16 ... шага за такт). Подробнее о режимах управления шаговыми двигателями смотрите в разделе Wiki - Шаговые двигатели.
- Например, ротор двигателя 17HS1352-P4130 совершит полный оборот (360°) за:
- 200 шагов в полношаговом режиме (1,8° за такт)
- 400 шагов в полушаговом режиме = 1/2 шага (0,9° за такт)
- 800 шагов при размере шага 1/4 (0,45° за такт)
- 1600 шагов при размере шага 1/8 (0,225° за такт)
- 3200 шагов при размере шага 1/16 (0,1125° за такт)
Чем больше шагов в полном обороте ротора двигателя, тем плавнее он вращается, но при этом уменьшается крутящий момент (сила вращения).
Драйвер A4988 позволяет выбрать 1 из 5 вариантов размера шага двигателя. Выбор размера шага осуществляется установкой логических уровней на входах драйвера MS3, MS2, MS1, в соответствии с таблицей:
| Размер шага | MS-3 | MS-2 | MS-1 |
|---|---|---|---|
| Полношаговый режим | 0 | 0 | 0 |
| 1/2 шага | 0 | 0 | 1 |
| 1/4 шага | 0 | 1 | 0 |
| 1/8 шага | 0 | 1 | 1 |
| 1/16 шага | 1 | 1 | 1 |
Примечание
Входы MS3, MS2 и MS1 драйвера, внутрисхемно прижаты к GND (через сопротивления в несколько десятков кОм). Так что если их оставить не подключёнными, то драйвер будет работать в полношаговом режиме.
Питание
- Напряжение питания логической части драйвера, от 3 до 5,5 В постоянного тока, подаётся на выводы GND и VLOG.
- Напряжение питания двигателя, от 8 до 35 В постоянного тока, подаётся на выводы GND и VMOT.
Ограничение максимального тока двигателя
Если на двигатель подать напряжение выше его номинального значения, это приведёт к увеличению скорости шага. Но увеличение напряжения приведёт и к увеличению силы тока, а превышение максимального тока двигателя, выведет его из строя.
Но драйвер A4988 позволяет ограничивать максимальный выходной ток двигателя (настраивается подстроечным резистором на плате драйвера). Таким образом можно увеличить напряжение в сети питания двигателя, предварительно ограничив выходной ток, по следующей формуле:
IMAX = VREF * 8 * RSENSE, следовательно, VREF = IMAX / (8 * RSENSE) где:
- IMAX - максимальный ток выдаваемый драйвером (не должен превышать номинальный ток двигателя).
- VREF - опорное напряжение (регулируется подстроечным резистором).
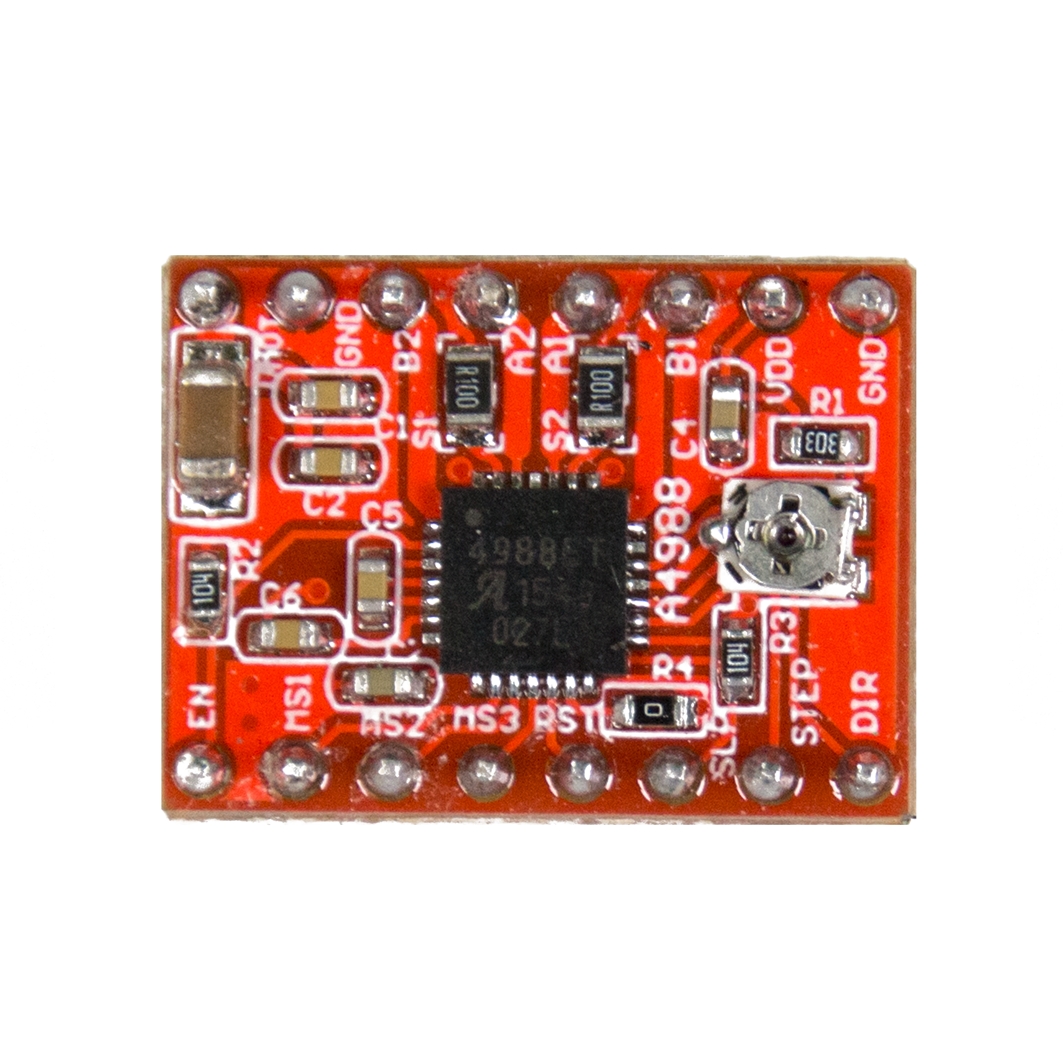
Это напряжение можно измерить между любым выводом GND и центральным выводом подстроечного резистора (металлическая вращающая часть). - RSENSE - токочувствительное сопротивление (номинал указан на корпусе резистора, см. картинку ниже).
Надпись на резисторе «R200» значит, что его сопротивление равно 0,200 Ом = 0,2 Ом.
Надпись на резисторе «R100» значит, что его сопротивление равно 0,100 Ом = 0,1 Ом.
Надпись на резисторе «R050» значит, что его сопротивление равно 0,050 Ом = 0,05 Ом.
 | Расположение деталей на плате драйвера: Синим цветом обведены токочувствительные резисторы RSENSE = 0,1 Ом. Так как драйвер ограничивает токи в двух обмотках двигателя, то и резисторов RSENSE на плате, тоже два. Зелёным цветом обведён подстроечный резистор, для регулировки опорного напряжения VREF. |
В представленной выше формуле, значения IMAX (номинальный ток двигателя) и RSENSE (токочувствительное сопротивление) являются константами, а единственный параметр который можно менять, это опорное напряжение VREF. Настройка опорного напряжения VREF осуществляется подстроечным резистором, без подачи питания двигателя VMOT. Состояния на входах «ENABLE», «STEP», «DIR», «MS-3», «MS-2», «MS-1» драйвера, не влияют на настройку опорного напряжения VREF (если их логические уровни не меняются во время настройки). Настройку можно выполнять даже при отключённом от драйвера двигателе.
Пример
Настройка ограничения максимального тока для двигателя с номинальным током в 1 А.
IMAX = 1 А.
RSENSE = 0,1 Ом.
VREF = IMAX / (8 * RSENSE) = 1 / (8 * 0,1) = 1,25 В.
Подаём питание логической части драйвера VLOG. Не подаём питание двигателя VMOT. Подключаем вольтметр черным щупом к любому выводу GND, а красным щупом к центральному выводу подстроечного резистора (металлическая вращающая часть). Поворачивая вращающуюся часть подстроечного резистора, добиваемся показаний на вольтметре = 1,25 В. Теперь можно подать питание двигателя VMOT. Ток протекающий через его обмотки не будет превышать 1 А.
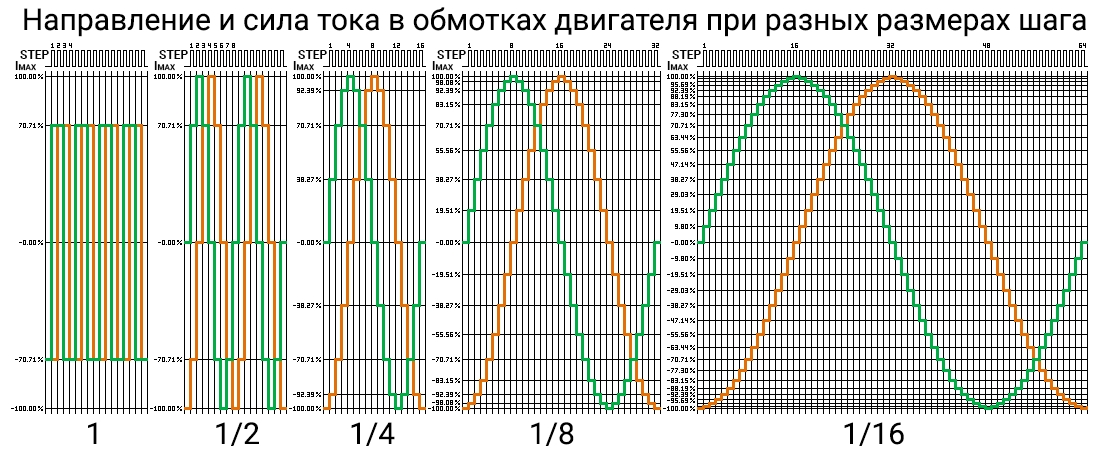
Примечание
Обратите внимание на картинку ниже, на ней показаны токи протекающие через обмотки двигателя в различных режимах размера шага. Если Ваш двигатель будет работать в полношаговом режиме, то максимальный ток будет ограничен 70,71% от установленного IMAX. Значит для полношагового режима работы это нужно учесть при расчёте IMAX. Так для приведенного выше примера, в полношаговом режиме работы, IMAX должен быть равен 1 А * 100 / 70,71 = 1A / 0,7071 = 1,41 A. Следовательно VREF = 1,41 / (8 * 0,1) = 1,7625 В. Но это только для полношагового режима работы двигателя.
Примечание
Чип A4988 может работать с выходным током до 2 А при наличии радиатора. Но выходной ток ограничивается напряжением VREF которое снимается с подстроечного резистора на плате драйвера. Максимальное значение VREF зависит от номиналов подстроечного резистора, и резистора R1 который входит в состав резистивного делителя. Производители устанавливают на платах резисторы различных номиналов, следовательно, максимальный ток для разных плат может отличаться. Для платы указанной на картинке, максимальное значение VREF = 1,35 В, следовательно максимальный выходной ток (IMAX) = VREF * 8 * RSENSE = 1,35 * 8 * 0,1 = 1,08 А.
Подробнее о драйвере
Как и в большинстве драйверов шаговых двигателей, силовая часть чипа A4988 представляет собой сдвоенный Н мост на полевых транзисторах, но больший интерес представляет логическая часть чипа. Драйвер позволяет выбирать размер шага: 1/1, 1/2, 1/4, 1/8 и 1/16 (подробно описано ниже, в разделе «выбор размера шага двигателя»). Чип оснащён множеством схем защит отключающих его при: перегреве, перегрузке по току, коротком замыкании и пониженном питании. Чип автоматически выбирает режим затухания тока (медленный / быстрый) и позволяет ограничивать максимальный выходной ток двигателя (настраивается подстроечным резистором, подробно описано ниже, в разделе «ограничение максимального тока двигателя»).
Комплектация
- 1x Драйвер A4988;
- 1x Радиатор;