МЫ СОЗДАЕМ И ПРОИЗВОДИМ
ЭЛЕКТРОННЫЕ НАБОРЫ И МОДУЛИ !





Описание товара
Подробное описание товара
Общие сведения
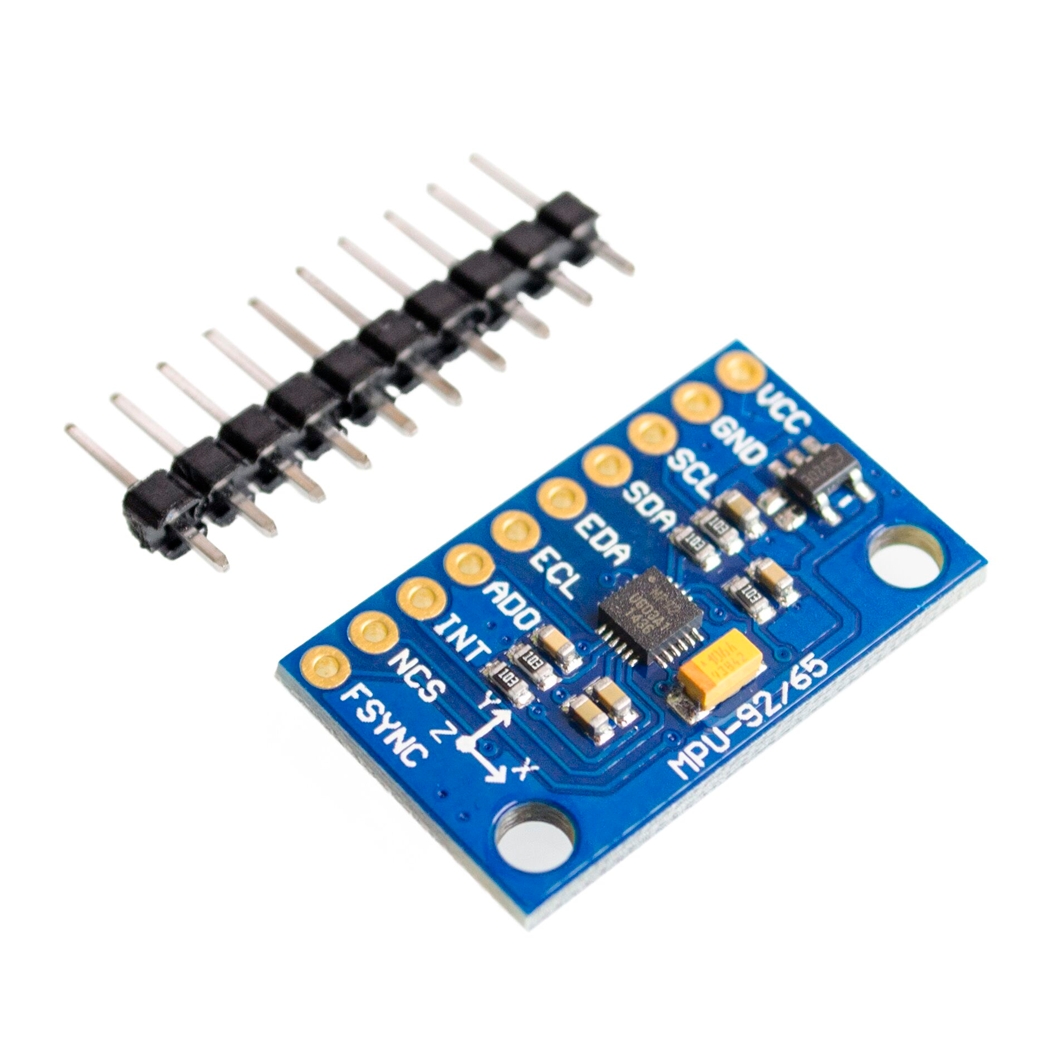
9-осевой сенсор MPU-9250 9DOF — сенсор второго поколения компании InvenSense для определения положения в пространстве, включающий в себя 3-осевой Гироскоп, 3-осевой Акселерометр и 3-осевой Компас (Магнетометр).
Характеристики
- Микросхема : MPU9250
- Интерфейс: I2C (400кГц) / SPI (1 МГц)
- Буфер: FIFO 512B
- Рабочие диапазоны гироскопа: ±250, ±500, ±1000, ±2000 °/с;
- Рабочие диапазоны акселерометра: ±2, ±4, ±8, ±16 g;
- Рабочий диапазон магнитометра: ±4800 мкТл;
- Напряжение питания: 2,4–3,6 В;
- Рабочий ток: гироскоп – 3,2 мА, акселерометр – 450 мкА, магнитометр – 280 мкА;
- Размер: 15мм х 25мм
Подключение
Подключить сенсор к микроконтроллеру Вы можете одним из 2 способов:
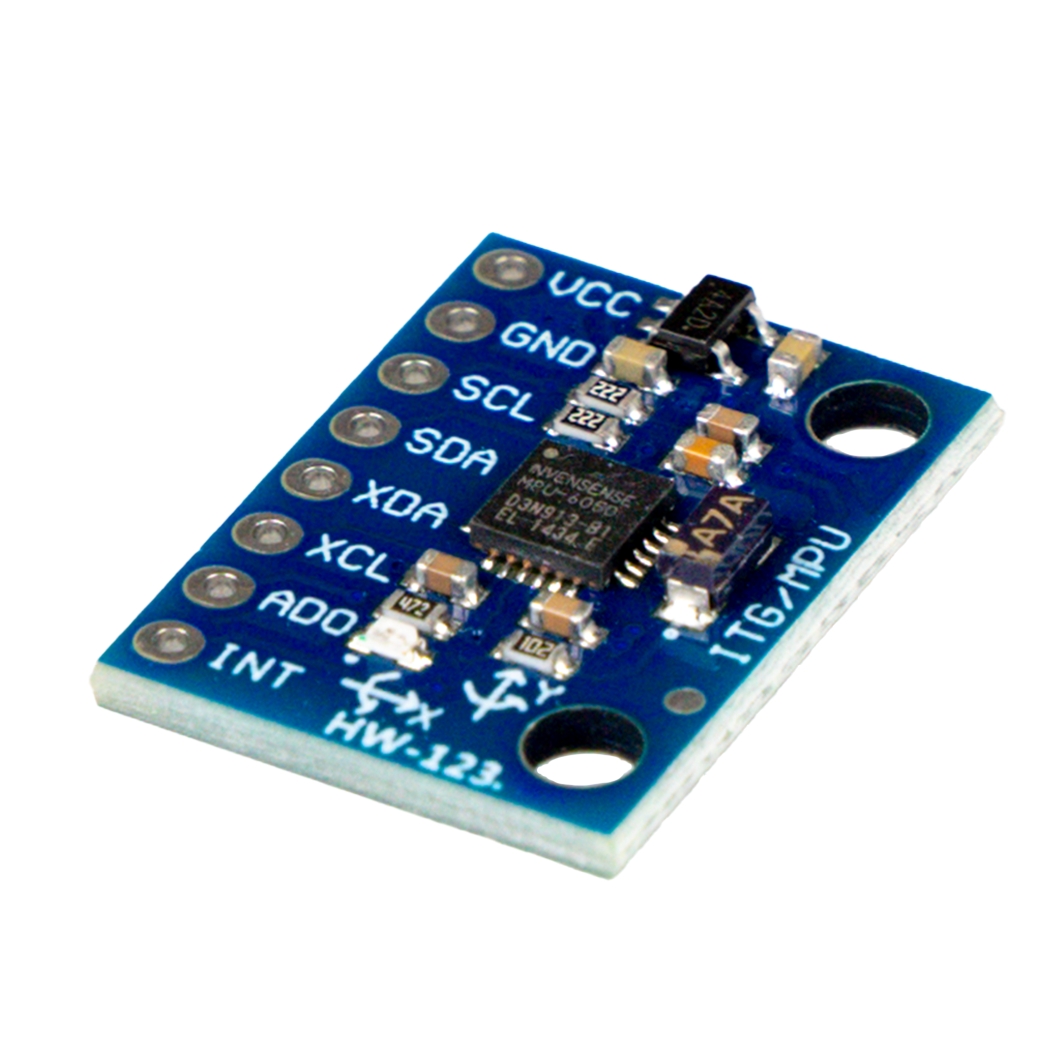
- по шине I2C: используя 4 контакта VCC, GNG, SCL, SDA
- по шине SPI: используя 5 контактов VCC, GND, SCL, SDA, CS, SDO
Питание
Для удобства подключения к Arduino воспользуйтесь Trema Shield, Trema Power Shield, Motor Shield или Trema Set Shield.
Входное напряжение питания 3,3 В или 5 В постоянного тока, подаётся на выводы VCC и GND модуля.
Подробнее о сенсоре
Микросхема сенсора MPU-9250 9DOF состоит из 2 чипов: MPU-6500 — чип, включающий в себя 3-осевой гироскоп и акселерометр и AK8963 — чип, включающий в себя 3-осевой компас и интегрированный Digital Motion Processor (DMP). DMP с помощью алгоритмов Motion Fusion обрабатывает данные с сенсоров и передаёт их внешнему микроконтроллеру по шине I2C/SPI.
Данный сенсор является одним из самых миниатюрных в мире (3мм*3мм*1мм). Используется в смартфонах, планшетах, носимых датчиках и других устройствах. Если к модулю добавить барометр, получится сенсор на 10 степеней свободы.
Может использоваться для создания дронов, роботов, 3-мерных контроллеров, а так же в системах, поддерживающих управление жестами.
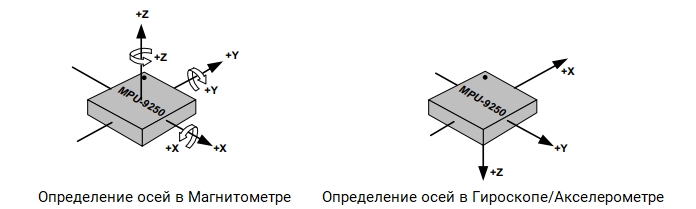
Обратите внимание, что в микросхеме MPU9250 определение осей у Гироскопа и Акселерометра одно, а у Магнитометра другое!
Для работы с сенсором вам понадобится библиотека IMU_10DOF. При необходимости Вы так же можете ознакомиться с DataSheet'ом.
Примеры
Калибровка компаса и вывод значений осей в монитор порта.
Подключим сенсор через I2C.
- VDD - подключается к выводу 5V Arduino UNO.
- GND - подключается к выводу GND Arduino UNO.
- SCL - подключается к линии тактирования SCL шины I2C или к выводу A5 Arduino UNO.
- SDA - подключается к линии данных SDA шины I2C или к выводу A4 Arduino UNO.
При старте происходит калибровка компаса, а далее в монитор порта выводятся значения каждой оси для акселерометра, гироскопа и магнетометра.
#include <Wire.h>
#include <I2Cdev.h>
#include <MPU9250.h>
// По умолчанию адрес устройства на шине I2C - 0x68
MPU9250 accelgyro;
I2Cdev I2C_M;
uint8_t buffer_m[6];
int16_t ax, ay, az;
int16_t gx, gy, gz;
int16_t mx, my, mz;
float heading;
float tiltheading;
float Axyz[3];
float Gxyz[3];
float Mxyz[3];
// время выполнения предварительной калибровки
#define sample_num_mdate 5000
volatile float mx_sample[3];
volatile float my_sample[3];
volatile float mz_sample[3];
static float mx_centre = 0;
static float my_centre = 0;
static float mz_centre = 0;
volatile int mx_max = 0;
volatile int my_max = 0;
volatile int mz_max = 0;
volatile int mx_min = 0;
volatile int my_min = 0;
volatile int mz_min = 0;
void setup()
{
//подключаемся к шине I2C (I2Cdev не может сделать это самостоятельно)
Wire.begin();
// инициализация подключения в Мониторе порта
// ( 38400бод выбрано потому, что стабильная работа наблюдается и при 8MHz и при 16Mhz, поэтому
// в дальнейшем выставляйте скорость согласно ваших требований)
Serial.begin(38400);
// Инициализация устройства
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
// Подтверждение подключения
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "MPU9250 connection successful" : "MPU9250 connection failed");
delay(1000);
Serial.println(" ");
// Предварительная калибровка магнитометра
Mxyz_init_calibrated ();
}
void loop()
{
getAccel_Data(); // Получение значений Акселерометра
getGyro_Data(); // Получение значений Гироскопа
getCompassDate_calibrated(); // В этой функции происходит калибровка магнитометра
getHeading(); // после чего мы получаем откалиброванные значения углов поворота
getTiltHeading(); // и наклона
Serial.println("calibration parameter: ");
Serial.print(mx_centre);
Serial.print(" ");
Serial.print(my_centre);
Serial.print(" ");
Serial.println(mz_centre);
Serial.println(" ");
Serial.println("Acceleration(g) of X,Y,Z:");
Serial.print(Axyz[0]);
Serial.print(",");
Serial.print(Axyz[1]);
Serial.print(",");
Serial.println(Axyz[2]);
Serial.println("Gyro(degress/s) of X,Y,Z:");
Serial.print(Gxyz[0]);
Serial.print(",");
Serial.print(Gxyz[1]);
Serial.print(",");
Serial.println(Gxyz[2]);
Serial.println("Compass Value of X,Y,Z:");
Serial.print(Mxyz[0]);
Serial.print(",");
Serial.print(Mxyz[1]);
Serial.print(",");
Serial.println(Mxyz[2]);
Serial.println("The clockwise angle between the magnetic north and X-Axis:"); // "Угол поворота"
Serial.print(heading);
Serial.println(" ");
Serial.println("The clockwise angle between the magnetic north and the projection of the positive X-Axis in the horizontal plane:"); // "Угол наклона"
Serial.println(tiltheading);
Serial.println(" ");
Serial.println();
delay(1000);
}
void getHeading(void)
{
heading = 180 * atan2(Mxyz[1], Mxyz[0]) / PI;
if (heading < 0) heading += 360;
}
void getTiltHeading(void)
{
float pitch = asin(-Axyz[0]);
float roll = asin(Axyz[1] / cos(pitch));
float xh = Mxyz[0] * cos(pitch) + Mxyz[2] * sin(pitch);
float yh = Mxyz[0] * sin(roll) * sin(pitch) + Mxyz[1] * cos(roll) - Mxyz[2] * sin(roll) * cos(pitch);
float zh = -Mxyz[0] * cos(roll) * sin(pitch) + Mxyz[1] * sin(roll) + Mxyz[2] * cos(roll) * cos(pitch);
tiltheading = 180 * atan2(yh, xh) / PI;
if (yh < 0) tiltheading += 360;
}
void Mxyz_init_calibrated ()
{
Serial.println(F("Before using 9DOF,we need to calibrate the compass first. It will takes about 1 minute.")); // Перед использованием сенсора необходимо произвести калибровку компаса. Это займёт около минуты.
Serial.print(" ");
Serial.println(F("During calibrating, you should rotate and turn the 9DOF all the time within 1 minute.")); // На протяжении всего времени калибровки Вам необходимо вращать сенсор во все стороны.
Serial.print(" ");
Serial.println(F("If you are ready, please sent a command data 'ready' to start sample and calibrate.")); // Если Вы готовы, для начала калибровки отправьте в Мониторе Порта "ready".
while (!Serial.find("ready"));
Serial.println(" ");
Serial.println("ready");
Serial.println("Sample starting......");
Serial.println("waiting ......");
get_calibration_Data ();
Serial.println(" ");
Serial.println("compass calibration parameter ");
Serial.print(mx_centre);
Serial.print(" ");
Serial.print(my_centre);
Serial.print(" ");
Serial.println(mz_centre);
Serial.println(" ");
}
void get_calibration_Data ()
{
for (int i = 0; i < sample_num_mdate; i++)
{
get_one_sample_date_mxyz();
/*
Serial.print(mx_sample[2]);
Serial.print(" ");
Serial.print(my_sample[2]); // здесь Вы можете увидеть полученные "сырые" значения.
Serial.print(" ");
Serial.println(mz_sample[2]);
*/
if (mx_sample[2] >= mx_sample[1])mx_sample[1] = mx_sample[2];
if (my_sample[2] >= my_sample[1])my_sample[1] = my_sample[2]; // Поиск максимального значения
if (mz_sample[2] >= mz_sample[1])mz_sample[1] = mz_sample[2];
if (mx_sample[2] <= mx_sample[0])mx_sample[0] = mx_sample[2];
if (my_sample[2] <= my_sample[0])my_sample[0] = my_sample[2]; // Поиск минимального значения
if (mz_sample[2] <= mz_sample[0])mz_sample[0] = mz_sample[2];
}
mx_max = mx_sample[1];
my_max = my_sample[1];
mz_max = mz_sample[1];
mx_min = mx_sample[0];
my_min = my_sample[0];
mz_min = mz_sample[0];
mx_centre = (mx_max + mx_min) / 2;
my_centre = (my_max + my_min) / 2;
mz_centre = (mz_max + mz_min) / 2;
}
void get_one_sample_date_mxyz()
{
getCompass_Data();
mx_sample[2] = Mxyz[0];
my_sample[2] = Mxyz[1];
mz_sample[2] = Mxyz[2];
}
void getAccel_Data(void)
{
accelgyro.getMotion9(&ax, &ay, &az, &gx, &gy, &gz, &mx, &my, &mz);
Axyz[0] = (double) ax / 16384;
Axyz[1] = (double) ay / 16384;
Axyz[2] = (double) az / 16384;
}
void getGyro_Data(void)
{
accelgyro.getMotion9(&ax, &ay, &az, &gx, &gy, &gz, &mx, &my, &mz);
Gxyz[0] = (double) gx * 250 / 32768;
Gxyz[1] = (double) gy * 250 / 32768;
Gxyz[2] = (double) gz * 250 / 32768;
}
void getCompass_Data(void)
{
I2C_M.writeByte(MPU9150_RA_MAG_ADDRESS, 0x0A, 0x01); // активируем магнетометр
delay(10);
I2C_M.readBytes(MPU9150_RA_MAG_ADDRESS, MPU9150_RA_MAG_XOUT_L, 6, buffer_m);
mx = ((int16_t)(buffer_m[1]) << 8) | buffer_m[0] ;
my = ((int16_t)(buffer_m[3]) << 8) | buffer_m[2] ;
mz = ((int16_t)(buffer_m[5]) << 8) | buffer_m[4] ;
Mxyz[0] = (double) mx * 1200 / 4096;
Mxyz[1] = (double) my * 1200 / 4096;
Mxyz[2] = (double) mz * 1200 / 4096;
}
void getCompassDate_calibrated ()
{
getCompass_Data();
Mxyz[0] = Mxyz[0] - mx_centre;
Mxyz[1] = Mxyz[1] - my_centre;
Mxyz[2] = Mxyz[2] - mz_centre;
}
Комплектация
- 1х сенсор MPU-9250;
- 1х СОединитель типа "ПАПА-ПАПА";