МЫ СОЗДАЕМ И ПРОИЗВОДИМ
ЭЛЕКТРОННЫЕ НАБОРЫ И МОДУЛИ !








Описание товара
Подробное описание товара
Общие сведения
Датчик пыли GP2Y1010AU0F — предназначен для обнаружения мельчайших частиц пыли в воздухе.
Датчик используется при построении систем очистки воздуха, мониторинга загрязнения воздуха или комплексно с другими системами.
Приблизительные критерии загрязнённости воздуха микрочастицами пыли:
| Концентрация микрочастиц пыли в воздухе | Качество воздуха |
| 0-50 | Высокое качество воздуха |
| 51-100 | Приемлемое качество воздуха |
| 101-150 | Негативное влияние на людей с обострённой восприимчивостью к пыли |
| 151-200 | Негативное влияние на все группы людей |
| 201-300 | Крайняя степень загрязнённости воздуха пулью |
Характеристики
- чувствительность: 0.5В/(100мкг/м3);
- измеряемый диапазон: 500мкг/m3;
- питание: 2.5-5.5В;
- рабочий ток: 20 мА;
- рабочая температура: -10~65℃;
- температура хранения: -20~80℃;
- габариты: 63.2x41.3x21.1 mm;
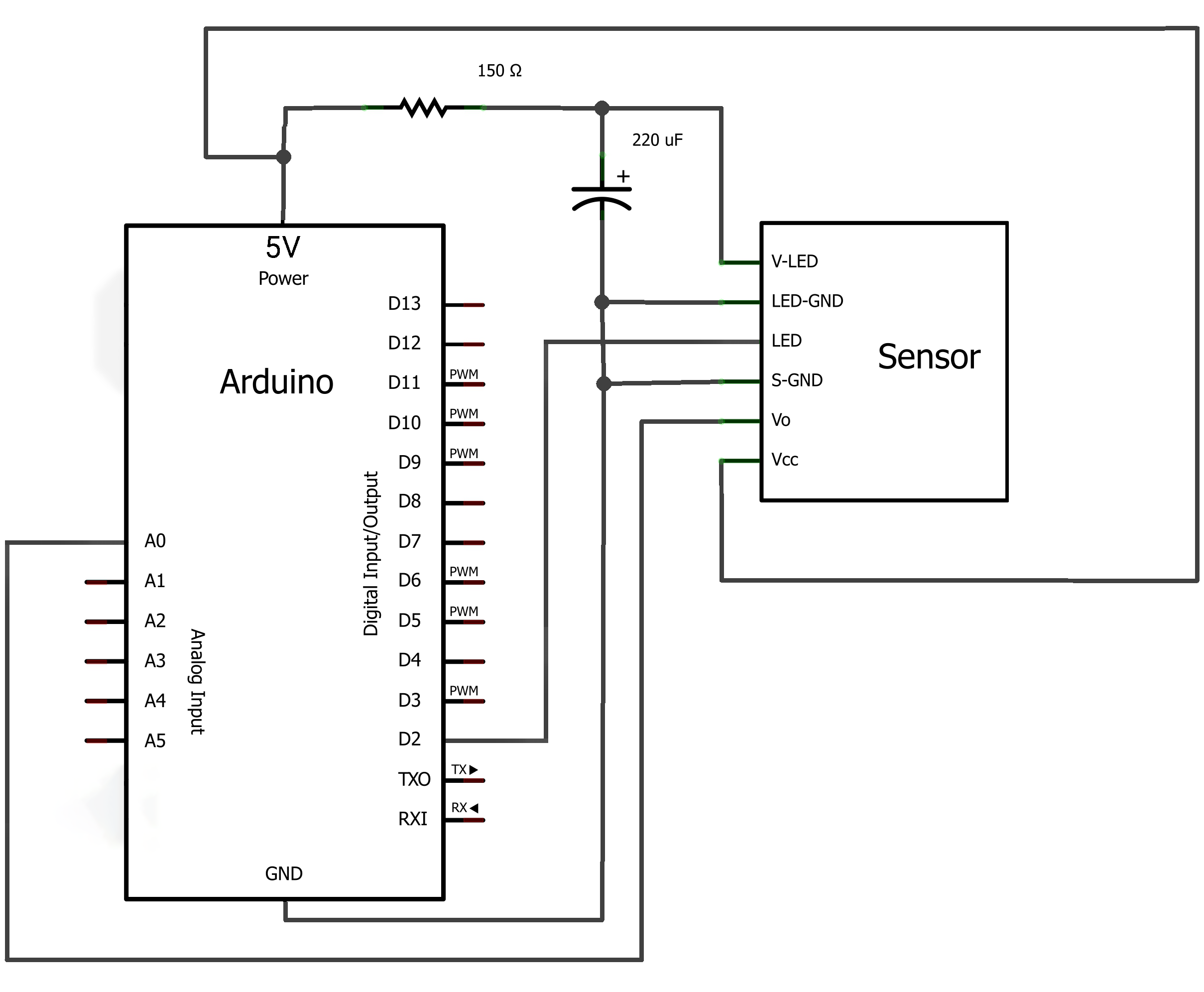
Подключение
| Вывод датчика GP2Y101AU0F | Цвет провода | Вывод Arduino |
| V-LED | Белый | 5V ( через резистор 150 Ом ) |
| LED-GND | Желтый | GND |
| LED | Оранжевый | D2 (любой цифровой вывод) |
| S-GND | Синий | GND |
| V0 | Черный | A0 (любой аналоговый вывод) |
| VCC | Красный | 5V |
Примеры
Вывод в монитор последовательного порта значений плотности микрочастиц пыли в воздухе.
int measurePin = A0; // задаём переменную для вывода А0, к которому подключен вывод датчика для передачи значений
int ledPower = 2; // задаём переменную для вывода 2, к которому подкючен управляющий вывод датчика
int samplingTime = 280; // задаём переменную для времени (в микросекундах), в течении которого датчик производит подсчёт значений
int deltaTime = 40; // задаём переменную для времени, которое необходимо датчику для передачи данных в буфер
int sleepTime = 9680; // задаём переменную для времени, в течении которого к датчику не будет обращения
float voMeasured; // задаём переменную для "сырых" значений с датчика
float calcVoltage; // задаём переменную для значений, переведённых из "сырых" в вольты
float dustDensity; // задаём переменную для значений, переведённых из вольт в плотность микрочастиц пыли в воздухе
void setup() {
Serial.begin(9600); // инициируем передачу анных в монитор последовательного порта на скорости 9600 бит/сек
pinMode(ledPower, OUTPUT); // настраиваем цифровой вывод 2 на работу в режиме выход
}
void loop() {
digitalWrite(ledPower, LOW); // задаём на управляющем выводе датчика значение LOW
delayMicroseconds(samplingTime); // ждём, пока датчик произведёт подсчет
voMeasured = analogRead(measurePin); // считываем значения с датчика
delayMicroseconds(deltaTime); // ждём, пока датчик передаст данные в буфер
digitalWrite(ledPower, HIGH); // задаём на управляющем выводе датчика значение HIGH
delayMicroseconds(sleepTime); // пауза 9680 микросекунд (минимальное время между опросами датчика)
calcVoltage = voMeasured * (5.0 / 1024.0); // переводим "сырые" значения в вольты
dustDensity = 0.17 * calcVoltage - 0.1; // переводим вольты в плотность микрочастиц пыли в воздухе
Serial.print("Raw Signal Value: "); // выводим текст в монитор порта "Сырые значения"
Serial.print(voMeasured); // выводим "сырые" значения с датчика в монитор порта
Serial.print(" --- Voltage: "); // выводим текст в монитор порта "Вольтаж"
Serial.print(calcVoltage); // выводим значения с датчика, переведённые в вольты
Serial.print(" --- Dust Density: "); // выводим текст в монитор порта "Плотность пыли в воздухе"
Serial.println(dustDensity); // выводим значение плотности микрочастиц пыли в воздухе в мкг/м3
delay(1000); // пауза 1 секунду
}
Комплектация
- 1х датчик пыли GP2Y1010AU0F;
- 1х Шлейф для подключения датчика;